Prethodno poglavlje
| Pocetna strana | Sledece
poglavlje
8. UPRAVLJANJE
ROBOTIMA
U glavi 3. opisali smo pogonske
sisteme koji se koriste za pokretanje robota. U glavama 6. i 7. objasnili smo
različite senzore koji čine takozvana čula. Prirodan nastavak
ovih razmatranje je definisanje sistema koji će obezbediti da robotski
uređaj, opremljen čulima i pokretačkim sistemom, ostvari
željeno kretanje sa krajnjim ciljem izvršenja nekog postavljenog
zadatka. To bi u najkraćem bio problem upravljanja robotom i sinteze
upravljačkog sistema.
8.1. OPŠTI
STAVOVI O UPRAVLJANJU ROBOTIMA
Razmotrićemo prvo pojam
upravljanja u slučaju robotskog sistema, zatim nivoe upravljanja kao i
neke pojmove značajne za primenu robota. Konačno, diskutovaćemo
i o osnovnim tipovima upravljanja koji slede iz vrste postavljenog zadatka.
8.1.1. Pojam i nivoi
upravljanja
U glavi 3. o pogonskim sistemima
definisali smo upravljačke promenljive pojedinih vrsta pogona. U
slučaju elektromotora jednosmerne struje u pitanju je napon na motoru, a u
slučaju elektrohidrauličnog pogona, struja servorazvodnika. Sada
zadatak upravljanja možemo definisati na sledeći način:
Obezbediti takvu promenu upravljačkih veličina koja će
proizvesti zadato kretanje u zglobovima robota. Dakle, zadatak se svodi na
zadato pokretanje zglobova.
Ovakva definicija, međutim, često nas ne može zadovoljti. Radi se o tome da robot treba da vrši takozvano funkcionalno kretanje. Kako se funkcionalno kretanje, po pravilu, vezuje za završni uređaj robota, to zadatak upravljanja treba unekoliko preformulisati: Potrebno je obezbediti takvu promenu upravljačkih promenljivih koja će proizvesti traženi funkcionalni pokret, tj. traženo kretanje završnog uređaja u prostoru. Svakako, ovako formulisan upravljački problem uključuje i prethodnu definiciju. Naime, funkcionalni pokret treba raspodeliti na zglobove, a zatim zglobove pokrenuti.
Problem upravljanja robotom možemo postaviti još opštije. Umesto da zadatak formulišemo preko određenog kretanja, možemo napraviti kvalitativni skok i zadatak formulisati u vidu zahteva da robot izvrši neku složenu praktičnu operaciju. Na primer, zadatak može biti: zavrnuti zavrtanj u predviđeni otvor. Ovakav zadatak sadrži niz funkcionalnih pokreta. Prvi pokret hvatanja zavrtnja, drugi prinošenje zavrtnja otvoru, treći zavrtanje i četvrti povratak u polazni položaj. Zadatak bi mogao biti još složeniji ako je, na primer, potrebno sastaviti neki sklop od više delova. Tada bi i broj elementarnih funkcionanih pokreta bio znatno veći. Konačno, veoma čest problem ovog tipa je sakupljanje predmeta rasutih po podlozi.
Opisani način postavljanja zadatka predstavlja kvalitativni skok u odnosu na ranije zahteve. Zadatak više nije kinematički orijentisan (zadato kretanje) već problemski orijentisan (izvršenje određene radnje). Problem koji treba rešiti robot prvo raščlanjuje na elementarne zahvate, tj. na niz elementarnih funkcionalnih pokreta, a zatim ih izvršava. Očigledno, ovo raščlanjavanje problema i utvrđivanje redosleda elementarnih radnji zahteva određenu "inteligenciju" kao i određene informacije tj. odgovarajuća čula. Sada zadatak upravljanja može da se formuliše na sledeći način: analizirati, a zatim izvršiti traženu radnu operaciju.
U prethodnoj diskusiji podrazumevali smo rad u potpuno poznatim uslovima. Tu mislimo na precizno definisan radni prostor i radne operacije. Sledeće uopštenje predstavlja uvođenje veće doze neizvesnosti. Radi se, često, o pojavi prepreka u radnom prostoru. Izvršenje zadatka tada podrazumeva i stalno ispitivanje prostora oko robota i odlučivanje o tome kako u konkretnom slučaju postupiti da bi se izvršio zadatak. Formulacija zadatka upravljanja, ipak, ostaje ista kao malopre.
Na kraju, možemo zamisliti i
naredno uopštenje: ne mora biti zadata čak ni radna operacija koju
treba izvršiti. Postavimo, na primer, ovakav zadatak: Ispitati dati
uređaj (ili sklop), naći kvar i otkloniti ga. U ovom slučaju
robot će tek nakon analize zaključiti koje radne operacije treba
izvršiti (npr. zameniti neki deo). Ovo uopštenje bi predstavljalo
novi kvalitativni skok jer zadatak postaje orijentisan ka cilju i problem
upravljanja formulišemo na odgovarajući način: izvršiti
operacije potrebne da bi se postigao traženi cilj.
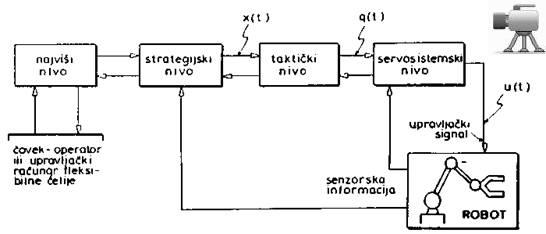
Sl. 8.1. Nivoi upravljačkog
sistema
Sledeći opisanu logiku uopštavanja zadatka koji se robotu postavlja dolazimo do upravljanja u više nivoa (Sl.8.1.) pri čemu svaki viši nivo priprema zadatak i upravlja radom nižeg nivoa. Takođe, svaki nivo će, u zavisnosti od potrebe, raspolagati određenim senzorskim informacijama.
Servosistemski nivo predstavlja najniži nivo upravljanja i on neposredno izvršava kretanje. Zato se, često, i naziva izvršni nivo. Zadatak mora biti u obliku zahteva za određenim kretanjem zglobova: q(t), gde je q vektor unurašnjih koordinata. Servosistemi u svakom zglobu obezbeđuju izvršavanje traženog kretnja.
Ovaj upravljački nivo prima zadatak od višeg nivoa ili pak, neposredno od čoveka-operatora ako viši nivo ne postoji.
Od mogućih senzorskih informacija servosistemski nivo koristi podatke o položaju i brzini pomeranja zglobova.
Taktički nivo je prvi viši nivo upravljanja i on vrši raspodelu kretanja na pod-sisteme zglobova. Zadatak se prima od višeg nivoa ili čoveka-operatora neposredno i to u obliklu zahteva za izvršenje određenog funkcionalnog pokreta X(t), gde je X vektor spoljašnjih koordinata. Na ovom nivou rešava se inverzni zadatak kine-matike čime se nalaze kretanje zglobova q(t). Taktički nivo u principu ne zahteva dopunske senzorske informaije.
Strategijski nivo. Na ovom upravljačkom nivou, problemski orijentisan zadatak (formulisan u obliku zahteva za izvršenja određene radne operacije) raščlanjuje se na elementarne funkcionalne pokrete X(t). Pri tome je neophodno izvršiti i planiranje kretanja koje nekada uključuje i različite vrste optimizacije koja omogućava da se raščlanjavanje izvrši na jednoznačan način. Na primer: treba po nekom kriterijumu optimizirati redosled sakupljanja rasutih predmeta. Strategijski nivo često uključuje vizuelne sisteme, daljinare i sl. Problem obilaženja prepreka u radnom prostoru može se rešavati na strategijskom nivou ili ga prepustiti sledećem višem nivou.
Najviši nivo upravljanja prima zadatak orijentisan ka cilju, analizira ga, i formuliše radne operacije potrebne za njegovo postizanje.
Na kraju ove diskusije treba naglasiti da se većina današnjih robota zadržava na taktičkom nivou, mada se intenzivno razvijaju metode veštačke inteligencije koje omogućavaju realizaciju strategijskog nivoa. Ovakvi inteligentni sistemi, mada postoje, još su srazmerno retki u odnosu na prostije robotske sisteme.
U nastavku ove glave
obrađivaćemo prvenstveno najniži (servosistemski) nivo
upravljanja. Naime, inverzni problem kinematike (traktički nivo) razmatran
je u glavi 2, a viši nivoi se zasnivaju na metodama veštačke
inteligencije, o čemu govori glava 9.
8.1.2. Preciznost kretanja
Preciznost kretanja robota je jedan od ključnih faktor uspešnog rada. Da bismo ovaj pojam bolje objasnili razmotrićemo tri veličine kojima se on u robotici opisuje: prostornu rezoluciju, tačnost pozicioniranja i ponovljivost. Sve ove veličine definisaćemo u odnosu na zadatak postizanja zadatog položaja robota u prostoru.
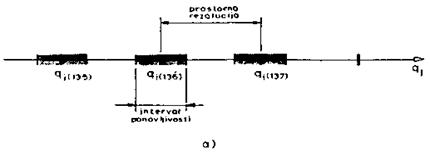
Prostorna rezolucija je najmanji
pomeraj koji robot može izvršiti po nalogu upravljačkog sistema.
To nam ukazuje da robot nema mogućnost kontinualnog pozicioniranja,
već postoji skup diskretnih položaja u radnom prostoru u koje robot
možemo dovesti. Ova diskretizacija posledica je digitalizacije podataka o
položaju u memoriji upravljačkog sistema. Na primer, ako se jedna
unutrašnja koordinata pamti u obliku 8-bitne informacije, to znači da
će ta koordinata imati 28=256 diskretnih položaja. Na slici 8.2a
predstavljen je jedan deo diskretizovane koordinate ![]() .Dopunski
problem javlja se usled mehaničkih efekata koji doprinose smanjenju
mogućnosti tačnog pozicioniranja. Jedan od takvih efekata je zazor u
prenosnom sistemu, drugi je elastična deformacija elemenata prenosnog
sistema, a postoji još niz faktora koji pojačavaju ove efekte. Tako
dolazimo do situacije da posmatrani zglob q^ ne možemo pozicionirati
tačno u neku od diskretnih tačaka već će se koordinata
naći negde u šrafiranoj okolini diskretizacionih tačaka (sl.
8.2a). Granice štafiranog intervala određuju se po metodi najgoreg
slučaja uzimajući u obzir zbirni uticaj pomenutih mehaničkih
faktora.
.Dopunski
problem javlja se usled mehaničkih efekata koji doprinose smanjenju
mogućnosti tačnog pozicioniranja. Jedan od takvih efekata je zazor u
prenosnom sistemu, drugi je elastična deformacija elemenata prenosnog
sistema, a postoji još niz faktora koji pojačavaju ove efekte. Tako
dolazimo do situacije da posmatrani zglob q^ ne možemo pozicionirati
tačno u neku od diskretnih tačaka već će se koordinata
naći negde u šrafiranoj okolini diskretizacionih tačaka (sl.
8.2a). Granice štafiranog intervala određuju se po metodi najgoreg
slučaja uzimajući u obzir zbirni uticaj pomenutih mehaničkih
faktora.
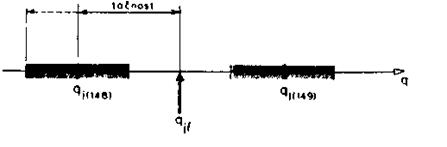
b)
SI. 8.2. Prostorna rezolucija,
ponovljivost i tačnost
Ponovljivost opisuje sposobnost
robota da ostvari položaj koji mu odredi upravljački sistem. Jasno
je da to može biti samo neka od diskretizacionih tačaka. Kako smo
već naglasili, usled mehaničkih nepreciznosti robot će doći
u neki od položaja unutar šrafiranog intervala, pri čemu će
pri svakom novom dolasku zauzeti drugi položaj iz intervala. Zato
šrafirani interval na sl.8.2a nazivamo interval ponovljivosti. Eksperimentalno
je moguće utvditi raspodelu verovatnoće zauzimanja pojedinih
tačaka u intervalu ponovljivosti.
Tačnost pozicioniranja. Do
sada smo razmatrali mogućnost robota da zauzme različite
položaje u prostoru uzimajući u obzir diskretizaciju radnog prostora.
Međutim, u konkretnom zadatku, od robota se zahteva da dođe u
položaj koji se u opštem slučaju ne poklapa sa nekim od
diskretizacionih položaja. Primer za koordinatu q, prikazan je na slici
8.2b. Traženi položaj qjf nalazi se između dve
diskvetizacione tačke koje upravljački sistem može definisati.
Tačnost pozicioniranja pretstavlja odstupanje koordinate od qjf .
Očigledno da je gornja granica ovog odstupanja jednaka polovini prostorne
rezolucije uvećane za poluinterval mehaničke nepreciznosti.
8.1.3. Tipovi upravljanja
Posmatrajući izvršni (servosistemski) nivo upravljanja možemo uočiti dva osnovna tipa upravljanja koji su tesno vezani i za tipove postavljenih zadataka. U pitanju su:
upravljanje od tačke do
tačke, i
upravljanje kontinualnim kretanjem.
Upravljanje od tačke do tačke (engl. point-to-point control) podrazumeva da se robotu zadaje niz različitih položaja, te on mora redom da dođe u svaki od njih. Pri tome, način kretanja između dva zadata položaja nije bitan. Uprošćeno, zadatak se svodi na to da svaki zglob robota ("j"), polazeći od proizvoljnog položaja, postigne zadatu poziciju qjf sa odgovarajućom tačnošću.
Ovakvim načinom upravljanja mogu se rešiti mnogi zadaci u industrijskoj primeni robota, na primer tačkasto zavarivanje, prenošenje materijala i sl.
Upravljanje kontinualnim kretanjem
(engl. continuons path control) podrazumeva da robot prati zadatu putanju u
prostoru uz zadatu promenu brzine duž putanje. Svedeno na servosistemski
nivo, zadatak formulišemo u vidu zahteva da svaki zglob ("j")
prati, sa određenom tačnošću, zadatu (nominalnu) promenu
qjnom(t).
Ovakav način upravljanja neophodan je za izvršavanje zadataka kao što su: šavno zavarivanje, farbanje, pisanje i sl.
S obzirom na to da je ovaj drugi
tip upravljanja opštiji problem, mi ćemo se pretežno
koncentrisati na njegovo rešenje. U principu, upravljanje od tačke do
tačke možemo posmatrati kao upravljanje kontinualnim kretanjem, pri
čemu je zadata nominalna putanja jednaka konstanti tj. qjnom(t) =qjf, a
početni položaj posmatramo kao početno odstupanje od zadate
putanje.
8.2. UPRAVLJANJE
RASPREGNUTIM SISTEMOM
Kada govorimo o upravljanju robotom kao raspregnutim sistemom, mislimo na to da se svakim zglobom robota upravlja kao izolovanim dinamičkim sistemom, dakle zanemarujući dinamički uticaj kretanja jednog zgloba na kretanje drugog. Razlog za ovo leži u složenosti proračuna dinamičkog sprezanja i težnji ka jednostavnosti upravljanja. Razmotrićemo mogućnosti ovakvog rasprezanja sistema.
U glavi 4. izveli smo
dinamički model kompletnog robotskog sistema. Model smo doveli do
kompaktne forme izražene jednačinom (4.23). Ovde ćemo se
podsetiti da se kompletan model formira polazeći od modela dinamike motora
i modela dinamike mehanizma.Dinamika motora zgloba "j" opisuje se
jednačinom (4.15)
tj.
![]() :
:
![]() (8.1)
(8.1)
gde je xj vektor stanja podsistema
motora "j" i dimenzija mu je kj. U daljem razmatranju usvojićemo
kj=2, tj. ograničiti se na model drugog reda čiji vektor stanja
sadrži položaj (![]() ) i brzinu (
) i brzinu (![]() ) motora:
) motora:
xj = [![]()
![]() ]T (8. 2)
k
]T (8. 2)
k
PMj je izlazni moment motora (skalama veličina), odnosno moment spoljašnjeg opterećenja, a uj je skalarni upravljački ulaz. Matrice sistema (Cj , fj , dj) opisane su u glavama 3. i 4.
Podsistemi SAj , j=l,...,n
međusobno su spregnuti posredstvom dinamičkog modela mehanizma koji
možemo napisati u formi (4.8). Ako pogone i kretanja zglobova
povežemo sa pogonima i kretanjima odgovarajućih motora posredstvom
reduktora odnosa Nj (relacija (4.16)), tada dinamiku mehanizma opisujemo modelom:
![]() (8.3)
(8.3)
Konkretno, podsistem SAj
spreže se sa ostalim podsistemima kroz momenat opterećenja Pmj:
 (8.4)
(8.4)
Rasprezanje možemo
najjednostavnije izvršiti na sledeći način. Koeficijente Hji, j≠i
zanemarićemo tj. proglasiti ih nulama. Koeficijent Hjj koji predstavlja
funkciju svih koordinata Θi, i=l,...,n smatraćemo konstantom i
usvojiti vrednost Hjj koju dobijamo nekom vrstom usrednjavanja ili
maksimizacijom. Konačno, sabirak hj(Θ,![]() ) takode
ćemo smatrati konstantom čija je vrednost hj. Sada momenat
opterećenja postaje
) takode
ćemo smatrati konstantom čija je vrednost hj. Sada momenat
opterećenja postaje
 (8.5)
(8.5)
Na ovaj način podsistem SAj
izolujemo od ostalih podsistema. Ukoliko Hjj/Nj2 dodamo inerciji rotora, tada
model (8.1) postaje
SAj
:
![]() (8.6)
(8.6)
Pri čemu C'j označava izmenjenu matricu Cj usled uvećanja momenta inercije.
Postavimo sada zahtev da
koordinata Θj ostvari kretanje koje ćemo zvati nominalnim tj.
Θjnom(t).Takvom kretanju odgovaraće promena brzine ![]() jnom(t).
Kako raspolažemo senzorima koji mere položaj
jnom(t).
Kako raspolažemo senzorima koji mere položaj ![]() j i brzinu
j i brzinu ![]() j , to praćenje nominalnog kretanja
realizujemo uvođenjem povratne sprege po koordinati i brzini
j , to praćenje nominalnog kretanja
realizujemo uvođenjem povratne sprege po koordinati i brzini ![]() j. Upravljački ulaz motora (uj)
sastojaće se iz nominalne komponente ujnom(t) izračunate iz modela
(8.6) za zadato nominalno kretanje i komponente povratne sprege ∆uj.
Komponenta ujnom se često i izostavlja. Usvojimo daje ∆uj linearna
funkcija odstupanja. Tada je:
j. Upravljački ulaz motora (uj)
sastojaće se iz nominalne komponente ujnom(t) izračunate iz modela
(8.6) za zadato nominalno kretanje i komponente povratne sprege ∆uj.
Komponenta ujnom se često i izostavlja. Usvojimo daje ∆uj linearna
funkcija odstupanja. Tada je:
∆uj = -KjP∆ Θj -
KjD∆![]() j
(8.7)
j
(8.7)
gde su:
∆ Θj = Θj –
Θjnom
(8.8)
∆![]() j =
j = ![]() j -
j -![]() jnom
(8.9)
jnom
(8.9)
odstupanja položaja i brzine od nominalnih vrednosti, a KjP i KjD su pojačanja povratne sprege. Prvi sabirak u (8.7) nazivamo, obično, pozicionom povratnom spregom, a drugi brzinskom ili diferencijalnom spregom. Ukupno, ovaj način upravljanja nazivamo P-D regulatorom.
U modelu (8.6) uočavamo i
sabirak fjhj/Nj koji predstavlja konstantni deo spoljašnjeg
opterećenja. U takvom slučaju korisno je uvesti i integralnu povratnu
spregu oblika KjI ∫∆Θjdt, zato što ova sprega ostvaruje
upravljački signal čak i kada greška ∆Θj padne na
nulu. Tako dolazimo do P-D-I regulatora
∆uj = -Kjp ∆Θj -
KjD∆![]() j - KjI∫∆Θjdt
(8.10)
j - KjI∫∆Θjdt
(8.10)
Način određivanja
pojačanja povratne sprege (Kjp,Kjd,Kji) koja će obezbediti
zadovoljavajuće praćenje nominalnog kretanja predstavlja zaseban
problem. Moguće je koristiti bilo koju od standardnih metoda poznatih iz teorije
automatskog upravljanja, ali to već izlazi iz domena ove knjige.
8.3. DVOETAPNA
SINTEZA UPRAVLJANJA
Glavni nedostatak pristupa
upravljanju opisanog u prethodnom odeljku je potpuno rasprezanje sistema.
Upravljanje sintetizovano na takvom raspregnutom modelu može biti u nekim
slučajevima sasvim neprimerno realnom sistemu. Naime, nekada je sprezanje
podsistema znatno i ne srne se na opisani način zanemariti.
U ovom odeljku pokazaćemo pristup koji u znatno većoj meri vodi računa o sprezanju.
Razdvojimo sintezu upravljanja na dve etape: etapu nominalnog kretanja i etapu poremećenog kretanja.
Smatraćemo da je zadatak dat
u vidu traženog nominalnog kretanja robota koje je izraženo promenom unutrašnjih
koordinata zglobova: qjnom(t),![]() jnom, j=l,...,n. Kako su pomeranja motora
direktno srazmerna pomeranjima zglobova, to pod nominalnim kretanjem
podrazumevamo i Θjnom(t),
jnom, j=l,...,n. Kako su pomeranja motora
direktno srazmerna pomeranjima zglobova, to pod nominalnim kretanjem
podrazumevamo i Θjnom(t), ![]() jnorn{i), j=l,...,n.
Ukoliko poznajemo dinamički model celog sistema (jednačine (8.1),
(8.3) ili kompaktni model (4.23), biće: ...(4.23)), ... tada možemo
izračunati upravljanja ulnom(t), ...,unom (t) koja nazivamo nominalnim i
koja će voditi sistem željenom putanjom. Ovaj proračun naziva se
etapom nominalnog kretanja ili etapom nominalne dinamike.
jnorn{i), j=l,...,n.
Ukoliko poznajemo dinamički model celog sistema (jednačine (8.1),
(8.3) ili kompaktni model (4.23), biće: ...(4.23)), ... tada možemo
izračunati upravljanja ulnom(t), ...,unom (t) koja nazivamo nominalnim i
koja će voditi sistem željenom putanjom. Ovaj proračun naziva se
etapom nominalnog kretanja ili etapom nominalne dinamike.
Ukoliko robot izvršava neki zadatak u kome je kretanje Θjnom(t), j=l,...,n poznato pre početka izvršavanja, tada je moguće unapred rešiti nominalnu dinamiku i izračunato nominalno upravljanje ujnorn(t), j=l,...,n memorisati na nekoj od periferijskih jedinica kako bi se moglo čitati i koristiti prilikom izvršenja kretanja. Ovo je, uglavnom, slučaj kod rutinskih industrijskih primena robota kada se stalno ponavlja unapred dato kretanje. U nekom složenijem slučaju qjnom(t) pa otuda i Θjnom(t) dobija se od taktičkog nivoa ali u realnom vremenu, dakle u toku izvršenja. Tada i ujnom moramo računati u realnom vremenu, što podrazumeva da raspolažemo algoritmima za rešavanje dinamike u realnom vremenu.
Ako bismo na stvarni sistem primenili samo nominalno upravljanje, tada bismo dobili sistem sa otvorenom spregom koji ne bi mogao pratiti željeno kretanje. To je otuda što takav sistem nema osobinu samokorekcije. U tom slučaju, nakon bilo kakvog poremećaja koji ga izvede sa željene putanje, sistem će "odlutati". Dopunski razlog je što je i nominalno upravljanje samo približno onome što je realnom sistemu potrebno. To je otuda što dinamički model nikada ne može uzeti u obzir sve karakteristike realnog sistema.
Kretanje realnog sistema nazivamo
etapom poremećenog kretanja i u toj etapi uvodimo povratne sprege i
određujemo odgovarajuće komponente upravljanja: ∆uj ,
j=l,...,n. Ukupno, upravljanje će biti oblika:
uj = ujnorn+∆uj,
j=l,...,n,
(8.11)
ili vektorski:
u= unom + ∆u (8.12)
gde se pojavljuju vektori
upravljanja (kolona matrice dimenzije n, npr u = [u1...un]T) Komponenta
upravljanja usled povratne sprege (∆u), u principu, je funkcija
odstupanja ∆Θ i ∆![]() , gde je Θ vektor
koordinata položaja motora (Θ= [Θ1...Θn]T). ∆u
može biti još i funkcija vremena.
, gde je Θ vektor
koordinata položaja motora (Θ= [Θ1...Θn]T). ∆u
može biti još i funkcija vremena.
Sada ćemo podsetiti da je
nominalno upravljanje sračunato na osnovu kompletnog modela dinamike, pa
uzima u obzir sprezanje podsistema. Pri sintezi povratne sprege, na etapi
poremećenog kretanja, možemo sistem raspregnuti, ili se, pak, i dalje
držati spregnutog modela. Prvi pristup nazivaćemo decentralizovano
upravljanje, a drugi pristup pokazaćemo na primeru sinteze linearnog
optimalnog regulatora.
8.3.1. Decentralizovano
upravljanje
Ovaj pristup unekoliko sledi logiku rasprezanja izloženu u odeljku 8.2., međutim, ovde se radi o upravljanju koje na nivou nominala vodi računa o sprezanju, a kretanje oko nominala posmatra se raspregnuto.
Posmatraćemo model kompletne
dinamike kao skup podsistema motora (8.1) koji su spregnuti posredstvom modela
mehanizma (8.3). Kako nominalnu dinamiku smatramo rešenom, to nominalno
kretanje i nominalno upravljanje smatramo poznatim: Θ jnom(t),![]() jnom{t), ujnom(t). U tom slučaju
modele (8.1) i (8.3) možemo napisati u formi odstupanja od nominala. Tako
za podsistem "j" dobijamo:
jnom{t), ujnom(t). U tom slučaju
modele (8.1) i (8.3) možemo napisati u formi odstupanja od nominala. Tako
za podsistem "j" dobijamo:
![]() (8.13)
(8.13)
Gde je
∆xj = xj —
xjnom(t), ∆PMj = PMj -
PMjnom', ∆uj= uj – ujnom k
a u slučaju modela drugog
reda još i ∆xj = [∆Θj ∆![]() j]T.
j]T.
Sprezanje ovog podsistema sa
drugim podsistemima, na nivou poremećaja, vrši se posredstvom momenta
∆PMj. Kada model (8.3), odnosno (8.4) napišemo u formi odstupanja,
dobija se:
 (8.14)
(8.14)
gde je:
![]() k
k
![]() (8.15)
(8.15)
a Θ označava vektor svih koordinata Θj.
Uočimo da kod pisanja u formi odstupanja svaka funkcija položaja Θ (npr. F(Θ)) postaje funkcija vremena t i odstupanja ∆Θ (npr. F(t, ∆Θ)) zbog toga što položaj posmatramo u obliku Θ=Θnom(t) + ∆Θ.
Jednačine (8.13) i (8.14), j = l,...,n određuju poremećajni model spregnutog sistema. Ukoliko želimo decentralizovano upravljanje, ovaj model je potrebno raspregnuti.
Prvo ćemo uočiti da se
sprezanje podsistema "j'' (model (8.13)) sa ostalim podsistemima
izražava kroz momenat ∆PMJ (8.14). U cilju rasrezanja, koeficijente
H*jk, j≠k zanemarujemo. Zadržavmo samo H*jj i smatramo ga konstantom
čija se vrednost određuje usrednjavanjem ili
maksimizacijom.Označimo tu vrednost sa ![]() .Sabirak hj*
možemo zanemariti ili smatrati linearnom funkcijom odstupanja ∆Θj
, što se može proceniti prethodnom simulacijom. Ukoliko uvedemo
.Sabirak hj*
možemo zanemariti ili smatrati linearnom funkcijom odstupanja ∆Θj
, što se može proceniti prethodnom simulacijom. Ukoliko uvedemo ![]() i zanemarimo hj*, iz (8.14)
dobijamo:
i zanemarimo hj*, iz (8.14)
dobijamo:
![]() (8.16)
(8.16)
čime smo raspregnuli sistem.
Podsistem (8.13) sada postaje:
![]() = C'jxi + dj∆uj,
(8.17)
= C'jxi + dj∆uj,
(8.17)
pri čemu C'j označava izmenjenu matricu Cj usled toga što je moment inercije rotora uvećan za HJJ/Nj2.
Sinteza upravljanja Au} za sistem
(8.17) sada se može izvršiti korišćenjem bilo koje od
standardnih metoda (npr. metode postavljanja poslova). Određuju se
pojačanja KjP i KjD i formira povratna sprega:
![]() (8.18)
(8.18)
Ukupno upravljanje za podsistem
"j" je:
![]() (8.19)
(8.19)
Očigledno je da se opisani način upravljanja razlikuje od pristupa izloženog u odeljku (8.2) prvenstveno po tome što je sada nominalno upravljanje izračunato iz spregnutog modela, dok je u prethodnom odeljku nominal računat iz raspregnutog modela, ili čak nije ni uziman u obzir.
Bez obzira na to što opisani postupak uzima u obzir sprezanje na nivou no-minala, sintetizovano upravljanje Uj ipak ne garantuje stabilnost realnog sistema u svim slučajevima. Kako je poremećeno kretanje posmatrano kao raspregnuto, to u slučajevima jakog sprezanja upravljanje može biti neodgovarajuće i čak dovesti do nestabilnosti. Možemo reći da su ovakvi slučajevi jakog sprezanja prilično retki, no ipak, nakon sinteze upravljanja, neophodno je proveriti stabilnost analizom nelinearnog poremećenog modela (8.13), (8.14), j = l,...,n.
Upravljanje ∆uj
sintetizovano na osnovu raspregnutog modela nazivamo lokalnom povratnom
spregom. Ukoliko se na ovaj način stabilnost ne može postići,
neophodno je uvesti dopunsku komponentu ∆ujG koju nazivamo globalnom povratnom
spregom i koja vodi računa o uticaju sprezanja.
8.3.2. Linearni optimalni
regulator
Ovaj pristup suštinski se razlikuje od prethodnog po tome što se i u etapi poremećenog kretanja posmatra spregnuti sistem.
Pošto sistem nećemo
rasprezati, to ćemo se pri izvođenju regulatora koristiti modelom
kompletne dinamike napisanim u kompaktnoj formi (4.23) tj.
![]() (8.20)
(8.20)
gde je x vektor stanja celog sistema (dimenzija N), a u vektor upravljanja (dimenzija n).
Ako kretanje razdvojimo na nominal
xnorn(t) i odstupanje ∆x, tada model možemo napisati u formi:
∆x = C*(t,∆x) + D*(t, ∆x)∆u,
(8.21)
gde je:
∆![]() = x -
xnorn(t), ∆u = u - unom(t); k
= x -
xnorn(t), ∆u = u - unom(t); k
C*(t, ∆x) = ![]() -
-
![]() +
+ ![]() ; k
; k
D*(t,∆x) = ![]() (x)
(8.22)
(x)
(8.22)
Početno odstupanje ∆x(0) smatra se poznatim.
Izvođenje linearnog optimalnog regualatora zahteva niz složenih koraka (npr. linearizacija, rešavanje Rikatijeve jednačine, i sl.). Kako to prevazilazi obim ove knjige, to ćemo se na nekim mestima ograničiti samo na postavku problema i interpretaciju rezultata.
U cilju sinteze regulatora
potrebno je linearizovati poremećajni model (8.21). Linearizacija se
vrši oko nominalnog kretanja xnorn(t) tj. oko nule poremaćaja ∆x.
Linearizacija se može izvršiti na različite načine:
numeričkim metodama, simboličkim metodama ili, pak, metodama
identifikacije. U postupke linearizacije ovde se nećemo upuštati.
Naglasićemo, međutim, da se u svakom slučaju linearizovani model
dobij a u obliku:
∆![]() =
= ![]() ∆x +
∆x + ![]() ∆u,
(8.23)
∆u,
(8.23)
gde se matrice ![]() i
i
![]() dobijaju linearizacijom i funkcije
su vremena. Dakle, dobijeni linearni model je nestacionaran. Ako bismo
sintetizovali optimalni regulator za takav sistem, došli bismo do
vremenski promenljivih pojačanja povratne sprege. Kako je to u principu
nepoželjno, izvršićemo uprošćenje modela (8.23) tako
što ćemo ga usrednjiti tokom vremena, odnosno naći srednje
vrednosti matrica
dobijaju linearizacijom i funkcije
su vremena. Dakle, dobijeni linearni model je nestacionaran. Ako bismo
sintetizovali optimalni regulator za takav sistem, došli bismo do
vremenski promenljivih pojačanja povratne sprege. Kako je to u principu
nepoželjno, izvršićemo uprošćenje modela (8.23) tako
što ćemo ga usrednjiti tokom vremena, odnosno naći srednje
vrednosti matrica ![]() i
i ![]() . Ako su srednje
vrednosti
. Ako su srednje
vrednosti ![]() i
i ![]() , tada (8.23) postaje
stacionarni model:
, tada (8.23) postaje
stacionarni model:
![]() (8.24)
(8.24)
Pretpostavimo sada da se sve
koordinate stanja mere što omogućava da se povratna sprega uvede po
svim odstupanjima ∆x, Tada sintezu regulatora vršimo na osnovu
minimizacije kvadratnog kriterijuma.
![]() (8.25)
(8.25)
gde su Q i R pozitivno definitne težinske matrice odgovarajućih dimenzija (Q(N x N); R(n x n)), koje se, kao i stepen stabilnosti γ, biraju tako da se obezbedi praktična stabilnost sistema.
Usvojeni postupak vodiće
rešavnju Rikatijeve jednačine. Ukoliko upravljanje pretpostavimo u
obliku:
![]() (8.26)
(8.26)
tada je K matrica dimenzija NxN i
predstavlja rešenje Rikatijeve jednačine:
![]() (8.27)
(8.27)
gde je I jedinična matrica
odgovarajućih dimenzija. Ukupno upravljanje je sada:
u = unom + ∆u.
(8.28)
Prilikom sinteze linearnog optimalnog regulatora uveli smo niz uprošćenja (linearizacija, usrednjavanje).Zbog toga rešenje (8.26) uz (8.28) ipak ne garantuje stabilnost realnog sistema. Zato bi trebalo izvršiti analizu stabilnosti nelinearnog modela poremećaja (8.21).
Dopunska nepogodnost leži u
pretpostavci o merljivosti svih koordinata stanja i uvođenju povratne
sprege po svakoj od njih. Naime, u praksi se, po pravilu, uvode povratne sprege
samo po položaju i brzini motora. Na primer, ne uvodi se sprega po struji
rotora iako je to jedna od koordinata stanja elektromotora (ako je opisan
modelom trećeg reda).
8.4. DIGITALNA
SHEMA UPRAVLJANJA
U prethodnim odeljcima izveli smo
postupak upravljanja zasnovan na korišćenju nominalnog upravljanja i
povratne sprege po položaju i brzini zglobova (q,![]() ). Preciznije
rečeno, povratnu spregu smo uveli po položaju i brzini motora koji
pokreću zglobove (dakle Θ,
). Preciznije
rečeno, povratnu spregu smo uveli po položaju i brzini motora koji
pokreću zglobove (dakle Θ,![]() ) S obzirom na
jednoznačnu i prostu vezu između koordinata motora Θ i
koordinata zglobova q, u principu je svejedno koja od ovih veličina
će učestvovati u formiranju povratne sprege. Kako se u
praktičnim realizacijama najčešće meri položaj i
brzina motora, to smo u prethodnim odeljcima uveli odstupanje, pa i povratnu
spregu po ovim veličinama (Θ,
) S obzirom na
jednoznačnu i prostu vezu između koordinata motora Θ i
koordinata zglobova q, u principu je svejedno koja od ovih veličina
će učestvovati u formiranju povratne sprege. Kako se u
praktičnim realizacijama najčešće meri položaj i
brzina motora, to smo u prethodnim odeljcima uveli odstupanje, pa i povratnu
spregu po ovim veličinama (Θ,![]() ). Svakako, postoji i
mogućnost merenja koordinate q umesto Θ (npr. ako se koristi
potenciometar).
). Svakako, postoji i
mogućnost merenja koordinate q umesto Θ (npr. ako se koristi
potenciometar).
Prethodno razmatranje ipak nije u
potpunosti tačno. Radi se o tome da u nekim slučajevima moramo uzeti
u obzir elastične deformacije u sistemu za prenos pogona, a tada
koordinate Θ i q postaju nezavisne (vidi odeljak 4.6). U takvom
slučaju više nije svejedno da li se meri jedna ili druga
veličina. Štaviše, u principu bi bilo poželjno meriti
obadve,međutim,to bi nas vodilo specijalnim tipovima regulatora o
čemu ovde nećemo govoriti.
Razmotrimo sada mogućnost praktične realizacije upravljačke sheme sa povratnom spregom prikazane na sl.8.3.
Blok za izračunavanje ∆u
na osnovu odstupanja ∆Θ i ∆![]() može se izvesti
na različite načine, o čemu je govoreno u prethodnim odeljcima.
Mi ćemo usvojiti da je u pitanju linearna forma tj.
može se izvesti
na različite načine, o čemu je govoreno u prethodnim odeljcima.
Mi ćemo usvojiti da je u pitanju linearna forma tj.
![]() (8.29)
(8.29)
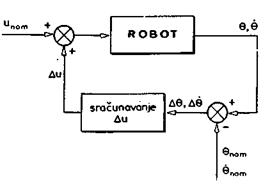
SI. 8.3.Upravljanje sa povratnom
spregom
Ukoliko ovu shemu realizujemo digitalno, dolazimo do detaljnije sheme koja je prikazana na sl. 8.4. Pri formiranju ove sheme smatrano je da se nominal izračunava unapred, a u toku izvršenja zadatka čita se sa diska.
U nekom trenutku (t) senzori
položaja mere koordinate Θ i ![]() .Nakon A/D konverzije
podaci ulaze u upravljački računar. Sada se sa diska čita
vrednost nominalnog položaja Θnom(t) i brzine
.Nakon A/D konverzije
podaci ulaze u upravljački računar. Sada se sa diska čita
vrednost nominalnog položaja Θnom(t) i brzine ![]() nom(t) i
izračunavaju se greške ∆Θ= Θ - Θnom i ∆
nom(t) i
izračunavaju se greške ∆Θ= Θ - Θnom i ∆![]() =
=![]() -
-![]() nom
nom
Na osnovu tih grešaka formira se signal povratne sprege A«. Nakon sabiranja sa nominalnim upravljanjem (u = unom + ∆u) i D/A konverzije, dobijeni napon primenjujemo na motore.
Od trenutka očitavanja senzora, pa do trenutka primene upravljanja prošlo je izvsno vreme ∆t. Dakle, upravljanje realizujemo ponavljajući opisani ciklus sa korakom ∆t koji nazivamo vreme razdvajanja. Dok se ne izračuna nova vrednost upravljanja primenjuje se vrednost izračunata u prethodnom koraku. Sledi da upravljanje ima stalnu vrednost tokom ∆t, a zatim se skokovito menja na novu izračunatu vrednost. Naglasimo još da u robotskim sistemima interval razdvajanja ne bi trebalo da bude duži od 20ms.
Pri primeni opisane sheme
upravljanja uočavamo neminovno kašnjenje. Naime, upravljenje (u) koje
odgovara stanju Θ, ![]() tj. trenutku t, biće
izračunato i primeniće se na motore tek u trenutku t + ∆t i
vodiće motore sve dok ne stigne nova vrednost, a to je trenutak t+2∆t.
Ovo kašnjenje, pogotovo u slučaju suviše velikog ∆t,
može bitno uticati na kretanje robota. Ukoliko se pokaže potreba, ovo
kašnjenje možemo korigovati postupkom predikcije (predviđanja).
tj. trenutku t, biće
izračunato i primeniće se na motore tek u trenutku t + ∆t i
vodiće motore sve dok ne stigne nova vrednost, a to je trenutak t+2∆t.
Ovo kašnjenje, pogotovo u slučaju suviše velikog ∆t,
može bitno uticati na kretanje robota. Ukoliko se pokaže potreba, ovo
kašnjenje možemo korigovati postupkom predikcije (predviđanja).
Razmotrimo šta bi bilo
neophodno uraditi u intervalu (t, t + ∆t) kako bi se korigovalo
kašnjenje. Ako imamo u vidu da će upravljanje (u), izračunato u
ovom intervalu, biti primenjeno tek od trenutka t + ∆t, onda
zaključujemo da bi ono trebalo da odgovara tom trenutku,dakle u(t+∆t).
Kako je nominalna komponenta
smeštena na disk, to njenu vrednost unom(t + ∆t) možemo
pročitati tokom intervala (t, t + ∆t). Međutim, povratna sprega
∆u(t + ∆t) zahteva poznavanje greški ∆Θ(t +∆t),
∆![]() (t + ∆t), a to ne možemo
izračunati budući da tokom intervala (t, t + ∆t) ne znamo
položaj i brzinu koje će motori imati na kraju intervala (tj.Θ(t
+ ∆t) i
(t + ∆t), a to ne možemo
izračunati budući da tokom intervala (t, t + ∆t) ne znamo
položaj i brzinu koje će motori imati na kraju intervala (tj.Θ(t
+ ∆t) i ![]() (t + ∆t)). Da bismo opisanu ideju
ipak sproveli izvršićemo predikciju i predvideti tražene
vrednosti u trenutku t + ∆t na osnovu vrednosti u trenutku t (tj. na
osnovu Θ(t),
(t + ∆t)). Da bismo opisanu ideju
ipak sproveli izvršićemo predikciju i predvideti tražene
vrednosti u trenutku t + ∆t na osnovu vrednosti u trenutku t (tj. na
osnovu Θ(t), ![]() ( t)) i niza prethodnih vrednosti. Tako
dobijamo prediktovane vrednosti Θ p i
( t)) i niza prethodnih vrednosti. Tako
dobijamo prediktovane vrednosti Θ p i ![]() p koje koristimo za
izračunavanje greški:
p koje koristimo za
izračunavanje greški:
![]() i
i ![]()
Sam postupak predikcije ovde
nećemo opisivati.
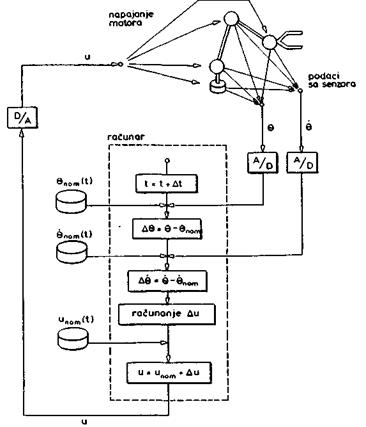
SI. 8.4. Digitalnu shema
upravljanja
Na slikama 8.3 i 8.4 uveli smo
blok koji izračunava povratnu spregu ∆u u zavisnosti od greški ∆Θ
i ∆![]() . Pri tome smo rekli da se obično
radi o linearnoj formi (8.29) tj. P-D ili P-D-I regulatoru.
. Pri tome smo rekli da se obično
radi o linearnoj formi (8.29) tj. P-D ili P-D-I regulatoru.
Sa stanovišta realizacije najpovoljnije je da pojačanja povratne sprege (KP, KD, KI) budu konstantna. Međutim, u nekim slučajevima to nije moguće. Posmatrajmo, na primer, zadatak u kome robot prenosi neke predmete sa jednog mesta na drugo. U fazi nošenja robot (njegovi motori) je znatno više opterećen nego u fazi kada se prazan vraća. Dakle, menjaju se dinamički parametri, pa će jednoj fazi odgovarati jedne vrednosti pojačanja, a drugoj fazi druge vrednosti. Tako dolazimo do promenljivih pojačanja koja menjaju vrednost u određenim trenucima, ali su to poznate i zadate vrednosti izračunate unapred na osnovu poznatih tereta koji će biti prenošeni.
Složeniji problem nastaje ako robot prenosi terete koji nisu unapred poznati. Dakle, radi se o promeni dinamičkih parametara u obimu koji nije zadat. U takvim slučajevima primenjuju se postupci estimacije kojima se vrši procena vrednosti opterećenja, pa se na bazi toga određuju odgovarajuće vrednosti pojačanja povratne sprege. Kako se u ovom slučaju robot sam prilagođava novom teretu tj. izmenjenim dinamičkim parametrima, to govorimo o adaptaciji i adaptivnom upravljanju.
Međutim, ako promena
dinamičkih parametara nije velika, tada nije neophodno menjati vrednosti
pojačanja. Naime, pojačanja možemo već na početku
odrediti tako da mogu odgovarati određenom intervalu promene nekog
dinamičkog parametra. Tada kažemo da je upravljanje robusno u odnosu
na promenu tog parametra.
8.5. PLANIRANJE
KRETANJA
Planiranje kretanja robota podrazumeva definisanje nominalnog funkcionalnog kretanja Xnom(t) koje odgovara izvršenju postavljenog zadatka.
U nekim slučajevima kretanje Xnom(t) jednoznačno je određeno samim zadatkom. Kao primer može nam poslužiti zadatak brušenja duž konture nekog vara (sl. 10.24b). Putanja je određena samom konturom, a orijenatacija uslovom normalonsti. Profil brzine direktno sledi iz zahteva za ravnomernim brušenjem.
Složeniji problem, međutim, nastaje ukoliko postoji višeznačnost rešenja nominalnog kretanja. Naime, u zadatku brušenja, u fazi kada robot iz početnog položaja prilazi mestu gde brušenje počinje, moguć je različit način kretanja Xnorn(t). Slično se događa uvek kada se postavlja samo zahtev krajnjeg položaja, a do tog položaja kretanje se može proizvoljno birati. Još ozbiljniji problem javlja se u slučaju kada robot mora da stigne u određeni broj tačaka, a redosled nije zadat. Tada ne samo da se bira putanja između tačaka već i redosled.
Konačno, složen problem izbora kretanja javlja se u slučaju kada je potrebno da robot izbegne prepreke u radnom prostoru. Pri tome ne samo da hvataljka mora zaobići prepreku već ni bilo koji deo ruke ne srne da udari u prepreku.
Ceo opisani skup problema i načina za njihovo rešavanje naziva se planiranjem kretanja. Planiranje se, u principu, vrši na strategijskom nivou upravljanja i često uključuje različite postupke optimizacije.
Problematika planiranja kretanja
prilično je složena i raznovrsna sa stanovišta pitanja koja
obraduje. Zato ćemo se zadovoljiti time što smo naznačili probleme
kojima se ova oblast bavi.
8.6. SIMULACIJA
KRETANJA ROBOTA
Pri projektovanju robota i to kako mehaničke konstrukcije tako i upravljačkog sistema postavlja se problem određivanja čitavog niza važnih parametara. Kod mehaničke konstrukcije u pitanju su, na primer, dimenzije poprečnih preseka segmenata mehanizma, a kod upravljačkog sistema može se raditi, na primer, o određivanju vrednosti pojačanja povratne sprege. Postoje različiti načini za određivanje ovakvih parametara. Međutim, vrednost izračunata ma kojim načinom ne može se smatrati verodostojnom dok se ne izvrši provera. Zadržimo se sada na ovom problemu provere. Provera podrazumeva analizu ponašanja realnog uređaja koji je napravljen na osnovu izračunatih vrednosti parametara. Zato je neophodno razviti postupak kojim bi se unapred, pre nego što je uređaj napravljen, moglo analizirati njegovo ponašanje. Takav postupak naziva se simulacija ponašanja.
Simulacija ponašanje robota zasniva se na njegovom matematičkom modelu. Umesto realnog uređaja koristi se matematički model čijim rešavanjem izračunavamo kretanje budućeg uređaja. Matematički model (dinamički model) robota opisan je u glavi 4. ove knjige, a rešava se pomoću računara. Tačnost izračunatog kretanja zavisi od tačnosti modela. Radi se o tome da matematički model nikada ne uzima u obzir sve dinamičke efekte. Na primer, model opisan u glavi 4, iako je veoma detaljan, ipak ne vodi računa o svim pojavama. Konkretno, u obzir nije uzeto trenje u zglobovima mehanizma. Simulacija nam samo daje približne odgovore o ponašanju budućeg uređaja ali treba znati da su izračunati rezultati veoma bliski ponašanju realnog uređaja.
Izložiće se postupak za simulaciju kretanja robota koji ima digitalni sistem upravljanja. Na početku se prvo razmotre podaci koje je potrebno zadati računaru da bi se izvršila simulacija. S obzirom na to da dinamički model zamenjuje realni uređaj, neophodno je zadati one podatke koji su potrebni za rešavanje dinamičkog modela, a to su: geometrija, mase i momenti inercije, podaci o motorima, i konačno, početno stanje robota. Takođe je neophodno znati i one podatke koji su potrebni za upravljanje robotom. Dakle, treba znati strukturu upravljačkog sistema uključujući vrednost pojačanja povratne sprege.
Objasnimo sada simulaciju robota
čija je upravljačka shema prikazana na slici 8.4. Ova shema zahteva
da se pre početka upravljanja sračunaju nominalne vrednosti
Θnom(t),![]() nom(t) i unom(t). Isti proračun
obavlja se i pre početka simulacije.
nom(t) i unom(t). Isti proračun
obavlja se i pre početka simulacije.
Za vreme simulacije
upravljački deo sheme ostaje isti, a realni mehanizam robota treba
zameniti matematičim modelom. Tokom objašnjenja upravljačke
sheme videli smo da nakon svakog vremenskog intervala ∆t upravljački
računar uzima od senzora podatke o položaju i brzini. Posmatrajmo
neki trenutak t. Nakon dobijanja podataka Θ i ![]() računar
izračunava upravljanje u(t) i primenjuje ga na pogonske
motore. Kako je za A/D konverziju i izračunavanje upravljanja
potrebno vreme ∆t to će se izračunato upravljanje primeniti na
motore tek u trenutku t + ∆t. U međuvremenu (od t do t + ∆t)
primenjuje se upravljanje iz prethodnog trenutka tj. u(t -∆t)(u' na sl.
8.5a). U trenutku t + ∆t ponovo se uzimaju podaci od senzora i ponavlja
ceo ciklus. Da bi se pri simulaciji realni uređaj zamenio dinamičkim
modelom moramo pomoću tog modela izačunati vrednosti
računar
izračunava upravljanje u(t) i primenjuje ga na pogonske
motore. Kako je za A/D konverziju i izračunavanje upravljanja
potrebno vreme ∆t to će se izračunato upravljanje primeniti na
motore tek u trenutku t + ∆t. U međuvremenu (od t do t + ∆t)
primenjuje se upravljanje iz prethodnog trenutka tj. u(t -∆t)(u' na sl.
8.5a). U trenutku t + ∆t ponovo se uzimaju podaci od senzora i ponavlja
ceo ciklus. Da bi se pri simulaciji realni uređaj zamenio dinamičkim
modelom moramo pomoću tog modela izačunati vrednosti ![]() Θ
i
Θ
i ![]() u trenutku t + ∆t tj.
izračunati ono što bi trebalo meriti senzorom na realnom
uređaju. Potrebno je izvršiti numeričku integraciju
dinamičkog modela na intervalu (t, t + ∆t) i dobiti Θ(t + At) i
u trenutku t + ∆t tj.
izračunati ono što bi trebalo meriti senzorom na realnom
uređaju. Potrebno je izvršiti numeričku integraciju
dinamičkog modela na intervalu (t, t + ∆t) i dobiti Θ(t + At) i
![]() (t + At) polazeći od vrednosti
Θ(t) i
(t + At) polazeći od vrednosti
Θ(t) i ![]() (t), a pri tome primenjujući
konstantno upravljanje u'. Shema postupka simulacije prikazana je na slici
8.5a.
(t), a pri tome primenjujući
konstantno upravljanje u'. Shema postupka simulacije prikazana je na slici
8.5a.
Na slici 8.5b prikazana je shema
simulacije u slučaju upravljanja sa predikcijom.
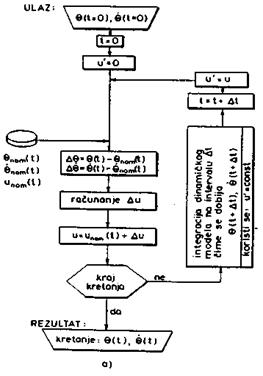
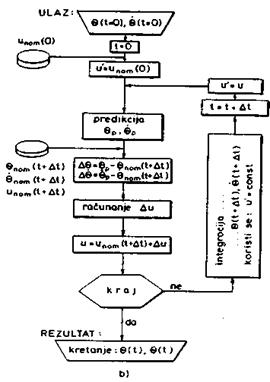
SI. 8.5. Shema postupka simulacije
Kao rezultat simulacije dobijamo
od računara funkcije Θ(t) i ![]() (t)tj. zakon kretanja
koje bi ostvario realni robot koji bismo napravili prema zadatim podacima.
Treba reći da se početno stanje Θ(t0).
(t)tj. zakon kretanja
koje bi ostvario realni robot koji bismo napravili prema zadatim podacima.
Treba reći da se početno stanje Θ(t0).![]() (t0)
može zadati tako da se uklapa u željeno kretanje, međutim,
češće se zadaje tako da postoji neko odstupanje od željenog
položaja u početnom trenutku. Ovo odstupanje uvodi se zato da bi se
videlo kojom brzinom će izabrana upravljačka shema poništiti to
odstupanje i dovesti robot na željenu putanju.
(t0)
može zadati tako da se uklapa u željeno kretanje, međutim,
češće se zadaje tako da postoji neko odstupanje od željenog
položaja u početnom trenutku. Ovo odstupanje uvodi se zato da bi se
videlo kojom brzinom će izabrana upravljačka shema poništiti to
odstupanje i dovesti robot na željenu putanju.
Sličnim postupkom može
se pomoću računara izvršiti simulacija ponašanja robota
koji ima bilo koju drugu strukturu upravljačkog sistema. Mogućnost
simulacije ponašanja robota pruža velike šanse za
usavršavanje procesa projektovanja. Moguće je brzo analizirati
ponašanje velikog broja različitih konfiguracija robota radi izbora
najpovoljnije. Moguće je i isprobati razne upravljačke sheme, razne
vrednosti pojačanja itd.
8.7.
PROGRAMIRANJE ROBOTA I ROBOTSKI PROGRAMSKI JEZICI
U ovom odeljku, pod naslovom "programoranje robota" govorićemo o nešto široj problematici. Razmotrićemo mogućnost zadavanja zadatka industrijskom robotskom sistemu ili, još opštije, mogućnosti komunikacije sa takvim sistemom.
Ako posmatramo robota čiji upravljački sistem raspolaže izvršnim (servosistemskim) i taktičkim nivoom upravljanja, tada zadavanje zadatka podrazumeva specificiranje kretanja mehanizma robota i radnog režima završnog uređaja. Pod ovim drugim podrazumevamo npr. otvaranje i zatvaranje hvataljke, uključivanje i brzinu obrtanja uređaja za zavrtanje zavrtnja, uključivanje i isključivanje pištolja za prskanje boje i sl. Razmotrićemo različite mogućnosti za zadavanje ovakvog zadatka. Preciznije rečeno, radi se o postupcima kojima se robot osposobljava da izvrši traženi zadatak. Zato se često i koristi termin obučavanje robota.
U uvodnoj glavi knjige (glava 1) spomenuli smo neke prostije sisteme kao što su industrijski manipulatori kojima se kretanje određuje mehaničkim graničnicima ili uz pomoć prekidača. Svaka izmena kretanja zahteva pomeranje graničnika i takav postupak samo uslovno možemo zvati programiranjem kretanja. Kod nešto složenijih sistema, robota prve generacije, kretanje se zadavalo u obliku niza tačaka pri čemu je svaka od njih određena tj. "pamćena" uz pomoć skupa potenciometara. Svaki potenciometar pamtio je položaj jednog zgloba i to u obliku analogne naponske informacije. Mi ćemo se, međutim, u ovoj glavi posvetiti savremenim načinima obučavanja robota i zadavanja manipulacionog zadatka.
Kod savremenih industrijskih
robota srećemo dva osnovna načina programiranja kretanja:
programiranje vođenjem,
tekstualno programiranje.
Ova dva načina, međutim,
ne treba razdvajati kao dva potpuno različita koncepta koji se
međusobno isključuju. Oni se često dopunjuju da bi se
iskoristile prednosti svakog od njih.
8.7.1. Programiranje vođenjem
Ideja ovog pristupa je da se u fazi obučavnja robot vodi putanjom koja se zahteva pri izvršenju zadatka. Tada robot pamti izvršeno kretanje i ponavlja ga kada se to od njega zahteva tj. u fazi praktičnog rada.Ovo je bila osnovna ideja, dakle obučavanje pokazivanjem, međutim pri realizaciji ovog pristupa pojavljuje se niz razlika. Tako, prema načinu vođenja razlikujemo ručno vođenje i posredno vođenje.
Ručno vođenje podrazumeva da čovek-operator ručno vodi završni uređaj robota onako kako on u praktičnom radu treba da se kreće. Pogodan primer je problem farbanja prskanjem. U fazi obučavanja operator pištoljem koji je učvršćen na vrhu robota radi one pokrete koje bi radio i pri ručnom farbanju. Na taj način on vodi robot koji kretanje pamti i tako se vrši obučavanje. Tokom ručnog vođenja operator uključuje i isključuje završni uređaj (npr. pištolj za prskanje) što robot takođe pamti.
U slučaju da je robot masivan i nepogodan za ručno vođenje projektuje se poseban mehanizam čija je geometrija identična sa geometrijom robota ali su mase značajno manje. Sada u fazi obučavanja operator ručno vodi ovu laganu "kopiju" robota.
Posredno vođenje je
savremeniji način programiranja robota. Robot se kreće sledeći
komande koje čovek-operator zadaje pomoću jedne vrste daljinskog
upravljača (najčešći engleski termin je: teach pendant).
Na ovom uređaju za obuku, koji je oblika kutije i veličine šake,
nalaze se prekidači i dugmad kojima se upravlja radom robota (sl. 8.6).
Način vođenja posredstvom ovog uređaja bitno je vezan sa
sledećom diskusijom.
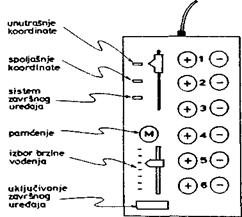
Sl.8.6 Uređaj za obuku
Prema razmatranjima u glavi
2(geometrija i kinematika) jedan od načina za zadavanje položaja i
kretanja robota je korišćenje unutrašnjih koordinata tj.
pomeranja u zglobovima (sl. 8.7al). Ako želimo da obučavamo robot na
ovaj način, tada ćemo na uređaju za obuku uočiti prekidač
za izbor koordinata i postaviti ga u položaj "unutrašnje koordinate"
. Za vođenje robota koristićemo šest parova dugmadi1. Svakim
parom dugmadi vodimo po jedan zglob robota. Pritiskom na dugme "+"
zglob se obrće u pozitivnom smeru, a pritiskom na dugme "-" u
negativnom. Na ovaj način, vođenjem jednog po jednog zgloba,
dovešćemo završni uređaj u položaj koji se zahteva.Taj
položaj robot će zapamtiti kada se na uređaju za obuku pritisne
određeno dugme ili se, pak, na tastaturi upravljačke jedinice
otkuca odgovarajuća naredba za
pamćenje.
Sada robot vodimo do drugog položaja koji se pamti, a postupak se ponavlja dok se u potpunosti ne definiše zadatak. Brzina vođenja može se podešavati posebnim regulatorom. Uključivanje i isključivanje završnog uređaja zadaje se pomoću odgovarajućeg prekidača na uređaju za obuku ili, pak, kucanjem naredbe na tastaturi upravljačke jedinice.
U fazi izvršenja zadatka
robot se kreće od jednog do drugog zapamćenog položaja pri
čemu brzina nije određena brzinom vođenja tokom obuke, već
se zadaje proizvoljno korišćenjem tastature. Pri kretanju od jednog
do drugog zapamćenog položaja robot pokreće sve zglobove istovremeno.
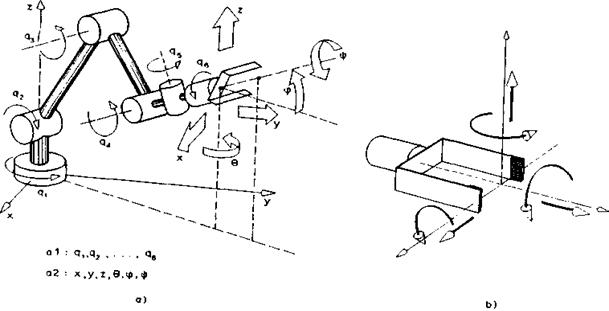
SI. 8.7. Način vođenja
robota.
Drugi način definisanja položaja i kretanja robota je korišćenje tzv. spoljašnjih koordinata (sl. 8.7a2). U pitanju su tri Dekartove koordinate "vrha" završenog uređaja (x, y, z) i tri ugla koji određuju njegovu orijentaciju u prostoru (Θ,φ,ψ). Ako želimo da robot vodimo na ovaj način, tada prekidač za izbor koordinata stavljamo u položaj "spoljašnje koordinate". Šest parova dugmadi na uređaju za obuku sada dobija drugačije značenje. Pritiskanjem nekog dugmeta prvog para ("+" ili "-") menja se koordinata x, a sve ostale (y, z, Θ, φ ,ψ) ostaju konstantne. Tako se svakim parom dugmadi podešava po jedna spoljašnja koordinata dok se završni uređaj ne dovede u traženi položaj koji se tada zapamti.
Očigledno je da vođenje robota u spoljašnjim koordinatama zahteva rešavanje inverznog zadatka kinematike i to u realnom vremenu.
Treći način vođenja robota u fazi obučavanja je korišćenje koordinatnog sistema vezanog za završni uređaj (sl. 8.7b). Tada se kretanje ostvaruje u obliku translacija duž osa ovog sistema i rotacija oko tih osa. Svakako, opet se koristi istih šest parova dugmadi pri čemu se prekidač za izbor koordinata postavlja u položaj "sistem završnog uređaja".
Razmotrimo sada tipove upravljanja. Ukoliko zadatak zahteva upravljanje od tačke do tačke (bez zadatog kretanja između) tada je obučavanje moguće izvršiti i ručnim i posrednim vođenjem. Takvi su, na primer, zadaci prenošenja, zadaci opsluživanja mašina, tačkasto zavarivanje i sl.
Kada je u pitanju praćenje kontinualne putanje, tada je problem obučavanje složeniji. Krenimo od jednog jednostavnijeg slučaja iz ove kategorije. Zahtevamo da se završni uređaj kreće pravolinijski između dve tačke. Obučavanje se u ovakvom slučaju može efikasno realizovati posrednim vođenjem. Naime, sistem za obučavanje koji raspolaže mogućnošću rešavanja inverzne kinematike, po pravilu, uključuje i metodu prostorne pravolinijske interpolacije između dve zapamćene tačke.
Najsloženiji problem predstavljaju zadaci u kojima završni uređaj mora da ostvari neko krivolinijsko prostorno kretanje sa istovremenom promenom orijentacije. Današnji uređaji za posredno vođenje uglavnom ne omogućavaju da se završni uređaj vodi na ovakav način. Uređaj koji bi to omogućio očigledno bi morao biti opremljen nekom vrstom složene upravljačke palice, no takvi uređaji još nisu u široj upotrebi. Otuda se u slučaju složenog krivolinijskog kretanja završnog uređaja još uvek koristi ručno vođenje u fazi obučavanja.
Istaknimo sada prednosti i nedostatke programiranja robota postupkom vod-jenja. Dve su glavne prenosti. Prva je jednostavnost: ne zahteva se nikakav složen softver kojim bi se upravljačka jedinica osposobila za obučavanje. Druga prednost je opet jednostavnost ali sa stanovišta preciznosti. Radi se o tome da ne moramo unapred znati tačne koordinate položaja u kojima završni uređaj obavlja neke operacije. Potrebno je samo znati "gde treba izvršiti operaciju", a merenje položaja se obavlja samim dovođenjem robota tj. završnog uređaja na odgovarajuće mesto.
Osnovna nepogodnost
obučavanja vođenjem leži u nemogućnosti da se programiranje
robota izvrši unapred. Naime, programiranje se može izvršiti tek
kada se robot postavi na proizvodnu liniju. To međutim, predstavlja
priličan gubitak vremena, pogotovo ako se proizvodnja obavlja u malim
serijama.
8.7.2. Robotski programski jezici
Kada govorimo o tekstualnom programiranju kretanja robota, obično podra-zumevamo programski jezik pomoću koga čovek-operator komunicira sa robotom i zadaje mu manipulacioni zadatak.
Danas je u upotrebi čitav niz robotskih programskih jezika različitog nivoa složenosti i različite opštosti. Dok su neki jednostavniji prilagođeni određenim primenama, dotle složeniji jezici dostižu priličnu univerzalnost i mogu se koristiti za programiranje niza zadataka u robotici. Ovu prilično raznovrsnu problematiku izložićemo na sledeći način. Zamislićemo jedan robotski jezik (nazvaćemo ga FO-ROB) tako što ćemo poznati programski jezik opšte namene - FORTRAN dopuniti određenim naredbama i osobinama koje će ga napraviti robotskim jezikom. Jezik koji ćemo na ovaj način formirati imaće određene sličnosti sa nekim postojećim robotskim jezicima i to nekada po formi pisanja naredbi, a nekada i po njihovom smislu. Ipak, jezik koji ćemo opisati samo je jedan hipotetički robotski jezik čija je svrha da ilustruje glavne karakteristike savremenih robotskih programskih jezika.
Konstantne i promenjljive tipa položaja. Jedna od osnovnih karakteristika robotskog jezika je mogućnost da pored uobičajenih tipova konstanti i promenljivih (celobrojne i realne), radi i sa konstantama i promenljivima tipa položaja. Ovakva konstanta sadrži u sebi sve informacije o položaju robota. S obzirom na to da se položaj određuje sa šest koordinata (npr. za robot sa šest stepeni slobode), to konstanta tipa položaja sadrži šest brojnih podataka.
Podsetimo se sada da je
položaj robota moguće odrediti preko unutrašnjih (q) i preko
spoljašnjih (X) koordinata. Otuda postoje dve vrste konstanti
položaja. Oznaka:
#
INTER: 0.785, 0., 1.57, 1.1, 0.2, 0.31#
predstavlja konstantu
položaja pri čemu INTER ukazuje da šest brojeva koji slede,
razdvojeni zapetama, predstavljaju unutrašnje koordinate robota tj. q1 =
0.785, q2 = 0., q3 = 1.57, q4 = 1.1, q5 = 0.2, q6 = 0.31. S druge strane kod
konstante:
#
EXTER: 1.52, 1., 1.4, 0.785, 0.2, 1.1#
oznaka EXTER ukazuje na to da šest brojeva koji slede predstavljaju spoljašnje koordinate robota tj. x=1.52, y=l., z=1.4, Θ = 0.785, φ = 0.2, ψ = 1.1. Podrazumeva se da su sve veličine izražene u SI sistemu jedinica (dužine u metrima, a uglovi u radijanima).
Promenljiva tipa položaja označava se nizom alfanumeričkih znakova, na primer A12. Pri tome, slično naredbi DIMENSION, koja se koristi za vektore i matrice, u ovom slučaju se na početku programa koristi naredba POSITION kojom se ukazuje da je neka promenljiva položajna (na primer POSITION A12).
Ako želimo da nekoj
položanoj promenjivoj dodelimo određenu vrednost, tada pišemo
naredbu:
Al = # EXTER: 0., 0.5, 0.8, 0.,
1.57, 0.# ,
a moguća je i naredba:
B2 = # EXTER: Hl, AC3, UR, STT,
SA, SB # , gde su Hl, AC3,... realne promenljive koje su definisane
u programu pre ove naredbe.
Kada na ovaj način zadajemo
položaj robota srećemo se sa jednim značajnim problemom:
potrebno je veoma precizno poznavati koordinate željenog položaja. Ovo
u praktičnom radu može biti nepogodnost. Naime, u primeru
opsluživanja mašine operator zna da radni predmet treba dovesti i
spustiti na određeno mesto u mašini, međutim, on, po pravilu, na
zna numerički tačne koordinate te tačke. Zato se programski
jezici obično formiraju tako da mogu prihvatiti i podatke dobijene
posrednim vođenjem robota. Sada se položaj zadaje na taj način
što se robot dovodi u željenu tačku, a zatim kuca naredba:
HERE Al kojom se promenljivoj Al
daje vrednost trenutnog položaja robota.
Naredbe za kretanje od tačke
do tačke. Kretanje robota iz trenutnog položaja u položaj
određen promenljivom Al zadaje se naredbom:
MOVE A1
Kod ove naredbe podrazumeva se da
je kretanje do položaja Al bazirano na upravljanju od tačke do
tačke, tj. međupoložaji nisu bitni. Ukoliko se, međutim,
želi pravolinijsko kretanje do tačke Al, naredba glasi:
MOVES Al.
Sada je potrebno precizirati i
brzinu kretanja. U slučaju upravljanja od tačke do tačke pogodno
je zadati vreme prelaska u novu tačku. U tu svrhu koristi se naredba TIME
u obliku:
TIME 2.5 ili
TIME T u zavisnosti od toga da li
vreme želimo tretirati kao konstantu (2.5s) ili kao realnu promenljivu
(T). Naredba TIME odnosi se samo na naredbu MOVE koja sledi odmah iza nje, na
primer:
TIME T
MOVE B2
Zadavanje brzine kretanja robota
moguće je i na drugi način koji je posebno pogodan kada se kretanje
posmatra u spoljašnjim koordinatama. Tada se naredbom:
SPEED 0.8/1.57 odnosno
SPEED V/OMEG zadaje brzina vrha od
0.8 m/s i brzina promene ugaone orijentacije od 1.57 rad/s, odnosno brzine V i
OMEG.
Brzina se može zadavati i
relativno, u odnosu na neku osnovnu brzinu koja se automatski postavlja na
početku programa. Tako naredba:
SPEEDR 70 definiše brzinu kao
70 procenata od osnovne brzine.
Brzina definisana naredbom SPEED
ili SPEEDR važi sve do nove naredbe SPEED (ili SPEEDR), tj. odnosi se na
sva kretanja koja se programski definišu između dve naredbe za
brzinu.
Promenljive tipa putanje. Cesto je
neophodno obezbediti kretanje robota kroz određeni broj tačaka. Takvo
kretanje nazivaćemo putanjom. Razlikovaćemo dve vrste putanja. Prva
vrsta definiše se određenim brojem tačaka između kojih se
vrši interpolacija. Promenljiva koja predstavlja takvu putanju
deklariše se na početku programa naredbom:
PATH P/5/ što znači da
promenljiva P predstavlja putanju definisanu sa 5 razdvojenih tačaka. U
programu se ovakva putanja zadaje na primer skupom naredaba:
P/l/ = Al
P /2/ = CA
P /3/ = B
P /4/ = A5
P /5/ = # EXTER: 0., 1.5, 1., 0.,
0., 0. #
čime se zadaje svaka od
tačaka koje definišu putanju. Zadavanje može biti preko
položajnih promenljivih (Al CA, ...) ili preko konstanti (kao što je
zadato P /5/).
Druga vrsta putanje je kontinualna
i određena nizom vrlo bliskih tačaka. U tom slučaju
interpolacija nije potrebna. Odgovarajuća promenljiva deklariše se na
početku programa naredbom:
PATHC P.
Zadavanje ovakve putanje vrši
se po pravilu uz korišćenje ručnog ili posrednog vođenja.
Naredbom HE(re)PAT(h)0, tačnije naredbom:
HEPAT0 P otpočinje
pamćenje putanje P, a naredbom:
HEPAT1 P se završava.
Kretanje duž putanje. Za kretanje
duž putanje prve vrste koristi se naredba:
MOVEP ukoliko se želi
interpolacija u unutrašnjim koordinatama, a:
MOVES P ukoliko se želi
pravolinijska prostorna interpolacija. Radi dobijanja glatke putanje
moguće je izvršiti i kružnu interpolaciju naredbom:
MOVER P. Tada se prva
kružnica provlači kroz tačke P/l/, P/2/, P/3/, i robot prati tu
putanju. Od tačke P/3/ do P/4/ robot prati novu kružnicu
provučenu kroz P/2/, P/3/ i P/4/, a zatim se postupak kružne
interpolacije ponavlja.
Praćenje putanje druge vrste
zadaje se naredbom:
MOVEC P.
Rad završnog uređaja.
Naredbe kojima se određuje rad završnog uređaja u priličnoj
meri zavise od vrste uređaja. Univerzalnost naredaba se može
postići jedino ako se komunikacija sa završnim uređajem svodi samo
na uključivanje i isključivanje. Tada naredbom:
TOOL ON uključujemo
završni uređaj (na primer: stiskanje hvataljke, uključivanje
pištolja za prskanja, i sl.). Naredbom:
TOOL OFF uređaj se
isključuje (širenje hvataljke, zaustavljanje tocila za brušenje
i sl.).
Ako je robot opremljen hvataljkom,
tada se umesto naredbi TOOL ON i TOOL OF obično koriste naredbe: CLOSEG i
OPENG (CLOSED(ripper)) i OPENG(ripper)). Ove naredbe ne treba mešati sa
FORTRAN-skim naredbama OPEN i CLOSE koje služe za rad sa datotekama.
Naredbe za rad sa završnm
uređajem mogu biti i složenije. Na primer:
CLOSEG (DISTANCE = 20 MM) je
zahtev da se hvataljka skupi do razmaka prstiju od 20 mm. Naredba:
CLOSEG (FORCE = 1.2) je zahtev da
se ostvari sila hvatanja od 1.2 N.
U primeru prskanja boje naredba:
TOOL ON (TIME = 15)
obezbeđuje da pištolj bude uključen u trajanju od 15 sekundi.
Konačno, u primeru
brušenja naredba:
TOOL ON (SPEED = 3 KRPM, FORCE =
20) predstavlja zahtev da se tocilo okreće brzinom od 3.000 obrtaja u minuti
i da se ostvari sila pritiska od 20 N.
Uočićemo da one veličine koje su izražene u SI sistemu jedinica ne zahtevaju specificiranje jedinica, dok veličine koje se zadaju u drugim jedinicama zahtevaju preciziranje jedinica (npr. MM i KRPM).
Senzorske informacije tretiraju se kao realne ili logičke promenljive. Ovo drugo se koristi u slučaju binarnih senzora.
Promenljive koje nose senzorsku iniformaciju mogu biti skalarne, vektorske ili matrične, u zavisnosti od karaktera senzora. Na primer, skalama promenljiva od-govaraće senzoru temperature, vektorska promenljiva šestokomponentnom senzoru sile, a matrična promenljiva površinskom senzoru sile.
Nakon što se pogodnim
naredbama neka senzorska informacija očita i dodeli joj se određena
promenljiva, stoji nam na raspolaganju niz FORTRAN-skih aritmetičkih i
logičkih operacija kojima možemo izraziti uticaj senzorske
informacije na dalji rad robota.
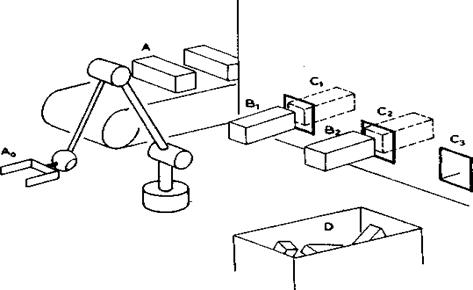
SI. 8.8. Shema manipulacionog
zadatka.
PRIMER 1. Posmatrajmo jedan prost
primer robotskog programa:
TIME 1.
MOVE# INTER: 0., 0., 1.57, 0., 0.,
0.785 #
DT = 0.1
T = 2.
DO l I= 1,10
T1 = 2 * T/3
TIME T1
MOVE# INTER: 1.57,0.785, 2.355,
0., 0.785, 0. #
T2 = T/3
TIME T2
MOVE# INTER: 0., 0., 1.57, 0., 0., 0.785 # 1
T=T - DT
Izvršavajući ovaj program robot će prvo iz svog trenutnog položaja preći u položaj q'= (0., 0., 1.57, 0., 0., 0.785) za vreme 1s. Zatim će 10 puta ponoviti ciklus kretanja iz položaja q' u položaj q"= (1.57, 0.785, 2.355,0., 0.785,0.) i natrag. Pri tome, vreme prelaska q'—+ q" je dva puta duže od vremena povratka q"—► q'.Vreme jednog ciklusa smanjuje se u svakoj iteraciji za O.ls, polazeći od 2s.
PRIMER 2. Na slici 8.8 prikazan je primer jednog manipulacionog zadatka. Pokretnom trakom dolaze predmeti koje je potrebno hemijski i termički obraditi. Robot kreće iz svog osnovnog položaja (Ao) i dolazi u položaj A gde hvata predmet. Sada sledi proces obrade. Robot donosi predmet u položaj B1, a zatim da pravolinijski uvlači u otvor C1 za nanošenje hemijskog sloja. Nakon 2 sekunde predmet se povlači natrag u B1. Zatim se pomera u B2 i onda pravolinijski uvlači u otvor C 2 gde ponovo ostaje 2 sekunde. Isto se ponavlja i sa otvorom C3, a nakon toga predmet se odlaže u kontejner D.
Programski segment kojim se
definiše ovaj zadatak izgledao bi ovako:
SPEEDR 80
(podešavanje brzine)
MOVE
A (pokret u A)
CLOSEG
(hvatanje predmeta)
MOVE
B1 (pokret u B1)
MOVES Cl (uvlačenje
predmeta u otvor Cl)
STAY
2. (robot stoji 2 sekunde)
MOVES B1
(izvlačenje predmeta)
deo programa označen sa *
ponavlja se analogno za otvore C2 i C3, nakon čega se robot našao u
položaju B3
MOVE
D (pokret do kontejnera)
OPENG
(puštanje predmeta)
MOVE
A0 (povratak u osnovni položaj gde robot
čeka novi predmet).
Neke specifičnosti. Neki
robotski jezici radi približavanja određenim praktičnim
primenama, sadrže i veoma specifične naredbe. Karakterističan je
sledeći primer: Robot često rešava zadatak hvatanja predmeta
tako što prvo dovede hvataljku iznad predmeta na visinu, npr., 50 mm sa
orijentacijom prema dole, a zatim hvataljku spusti i uhvati predmet. Ako
položaj hvatanja označimo sa A, tada treba uvesti međutačku
AA vertikalno iznad A za 50 mm. Program za definisanje ovog zadatka izgledao bi
ovako:
MOVE AA
MOVES A
CLOSEG
MOVES AA
nakon čega se robot
našao u međupoložaju odakle vrši dalje operacije sa predmetom.
Da bi se izbeglo zadavanje medupoložaja AA uvodi se naredba APPRO
A50 koja označava zahtev da hvataljka priđe tački A i postavi se
na 50 mm iznad nje. Program bi sada izgledao ovako:
APPRO A50
MOVES A
CLOSEG
DEPART 50
gde naredba DEPART zahteva
povratak hvataljke u medupoložaj iznad A.
Još jedna specifičnost
je na primer naredba:
MOVE A VIA B
kojom se zahteva da robot iz
trenutnog položaja dođe u položaj A ali da u tom kretanju
prođe kroz B. Ovakvo zadavanje pokreta koristi se radi izbegavanja
prepreke koja se nalazi između trenutnog položaja i položaja A.
Jedna od najvažnijih specifičnosti koje odlikuju najsavremenije robotske jezike je mogučnost definisanja referentnih sistema ili, pak, mogućnost superpozicije položaja tj. uvođenje relativnog položaja. Posmatrajmo opet primer 2 iz ovog odeljka (sl.8.8): U tom zadatku zahtevano je uvođenje predmeta u tri otvora. Sam postupak uvođenja bio je identičan za svaki otvor ali se izvodi polazeći iz različitih položaja robota. Program je u primeru napisan tako da su tri puta ponavljane odgovarajuće naredbe. Jasno je da bi u slučaju većeg broja otvora ovakav način pisanja programa bio nefunkcionalan.
Jedan način za rešavanje ovog problema je definisanje referentnih sistema tako da svako uvlačenje bude zadato indentičnim skupom naredaba čime se omogućava formiranje programske petlje.
Drugi način postizanje istog cilja je uvođenje računskih operacija "sabiranja" i "oduzimanja" u skupu položajnih promenljivih. Pri ovome A+B se tretira kao superpozicija tj. B se smatra relativnim položajem u odnosu na A. Ova operacija naziva se i komponovanje. Kod oduzimanja, E=C-D daje relativni položaj C u odnosu na D.
Vratimo se primeru 2. i
napišimo program koji koristi komponovanje i radi za K otvora. Uvedimo
prvo promenljivu BB kao relativni položaj tačke B2 u odnosu na B1 i
uopšte Bi+1 u odnosu na B .Takođe uvedimo promenljivu BC koja
predstavlja relativni položaj Ci u odnosu na B. Položaj B1
zadaćemo u programu samo kao B. Sada program za zadatak u primeru 2.
možemo napisati ovako:
SPEEDR 80
MOVE A
CLOSEG
DO 1 I=1,K
MOVE B
C=B+BC
MOVES C
STAY 2.
MOVES B
IF (I.EQ.K) GO TO 2
B =B + BB
MOVE D
OPENG MOVE A0
Ovim bismo kompletirali izlaganje o robotskim programskim jezicima smatrajući da je to dovoljno da se shvate principi formiranja jezika.
Pri razmatranju upravljanja
robotima niz problema je ostao nepotpuno obrađen. Na primer, nismo se
upuštali u probleme sinteze lokalnih regulatora, nije obrađeno pitanje
stabilnosti itd. U našem izlaganju o upravljanju prvenstveno smo obradili
specifičnosti upravljačkih zadataka u robotici.