Prethodno poglavlje
| Pocetna strana | Sledece
poglavlje
4. DINAMIKA
ROBOTA
Dinamika robota je od svih
teorijskih aspekata robotike poslednja nasla praktičnu primenu. Zato
ćemo na početku izneti određena obrazloženja i argumente u
prilog njene primene.Krenimo od činjenice da se uspešno projektovanje
i upravljenje nekog sistema ne može izvesti bez njegovog dobrog
poznavanja. Ovo je, svakako tačno, ali pod pojmom "dobrog
poznavanja" ne podrazumeva se uvek isto. Razmatrajmo problem
mehaničkog sistema - konkretno jednog robota. Dobro poznavanje takvog
sistema može, a ne mora uključivati poznavanje matematičkog
modela njegove dinamike (tzv. dinamičkog modela). U ranijim fazama razvoja
robotike projektovanje robota nije uključivalo tačan proračun
dinamike, a upravljanje nije vodilo računa o mnogim dinamičkim
efektima već se, uz određene aproksimacije, svodilo na poznatu
teoriju automatskog upravljanja. Ovakav pristup bio je posledica nerazvijene
teorije robotike. Naime, dugo vremena praksa proizvodnje i primene robota
razvijala se nezavisno od teorije koja je bila često isuviše
akademski orijenti-sana. Ovakvo stanje ipak nije sprečilo neke proizvođače
da naprave veoma uspešne robotske uređaje.U današnje vreme,
međutim, zahtevi za složenim i vrlo brzim robotskim sistemima
diktirali su povezivanje teorije i prakse. Sa stanovišta primene dinamike
robota ključnu ulogu je odigrao razvoj efikasnih metoda za proračun dinamike
uz pomoć računara. Uz niz kasnije razrađenih metoda,
dinamički model i na njemu zasnovani proračuni i simulacija, postao
je nezaobilazni deo svakog uspešnog pro-jektovanja robota.Druga
mogućnost za primenu dinamičkog modela je dinamičko upravljanje.
Ta mogućnost se danas još uvek malo koristi, međutim, metode za
sračunavanje dinamike u realnom vremenu, koje već postoje, znatno nas
približavaju ovom cilju.Ova glava razmatra prvo osnovni pristup opisivanju
dinamike robota i formiranju dinamičkog modela. Detaljno izvođenje
jedne od metoda za formiranje modela dato je u prilogu P3, a ovde se razmatra
forma i korisćenje dobijenog rezultata. Ovo je urađeno zato da bi se
ova glava rasteretila od dugačkih matematičkih izvođenja koja
zahtevaju i obimno znanje mehanike.Dalje u ovoj glavi se razmatra
rešavanje direktnog i inverznog problema dinamike, a zatim i primena
računara u proračunu dinamike robota. Na kraju ćemo ukazati i na
neke specijelne probleme: dinamika robota sa elastičnim deformacijma u
sistemu za prenos pogona i dinamika u fazi funkcionalno zatvorenog lanca.
4.1.
DINAMIČKI MODEL ROBOTA
Pod dinamičkim modelom robota
podrazumevaćemo sistem diferencijalnih jednačina koje opisuju
dinamiku robota. Izvođenje modela zahteva dosta znanja iz mehanike,
pogotovo mehanike krutog tela, koje veći broj čitalaca možda
nema. Zato ćemo ovde izložiti glavne ideje i formule i interpretirati
krajnji rezultat, a detaljno izvođenje modela dati u prilogu P3.
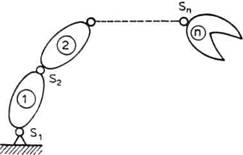
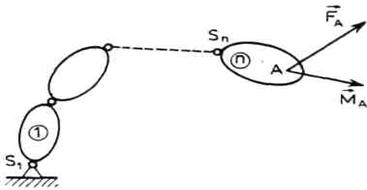
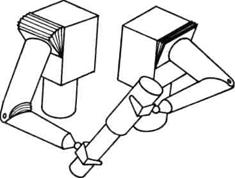
Sl. 4.1. Robot kao otvoreni
kinematički lanac
Posmatrajmo manipulacioni robot kao otvoreni kinematički lanac bez grananja (sl. 4.1). Označimo zglobove redom sa S1, S2,..., Sna segmente sa 1,2,...n. Pretpostavimo, zatim, da su zglobovi takvi da omogućavaju jednu relativnu rotaciju ili jednu relativnu translaciju. Kako svaki zglob ima po jedan stepen slobode to će mehanizam ukupno imati n stepeni slobode. Dinamiku takvog mehaničkog sistema možemo opisati sa najmanje n skalarnih diferencijalnih jednačina drugog reda. Taj sistem jednačina zvaćemo dinamički model.
U glavi 2. posvećenoj
kinematici uvedene su tzv. generalisane koordinate q1,..., qn
kao najmanji skup parametara koji jednoznačno definišu položaj
robota.Za generalisane koordinate izabrana su pomeranja u zglobovima pa smo ih
zvali i unutrašnje koordinate. Vektor unutrašnjih (generalisanih)
koordinata je definisan kao
![]()
Dinamiku mehanizama robota
možemo sada opisati na više načina: primenom opštih teorema
dinamike sistema (teorema o količini kretanja i teorema o kinetičkom
momentu), primenom Lagranževih jednačina, primenom Apelovih
jednačina ili Gausovog principa. Model koji se dobija svakako je isti bez
obzira nai pristup koji se koristi jer su svi ovi pristupi u suštini
ekvivalentni. Međutim, sa stanovišta metodologije sastavljanja modela
razlike su bitne. Ovde ćemo koristiti; opšte teoreme dinamike jer
takav pristup zahteva najmanje znanja iz mehanike. Da bismo formirali
dinamički model celog sistema tj. celog lančanog mehanizma
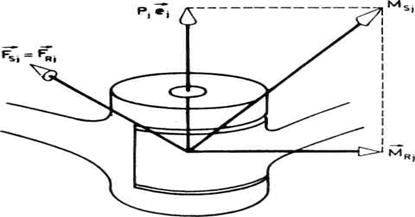
krenućemo od posmatranja jednog njegovog segmenta. Neka to bude segment
"j". Ako hoćemo da posmatramo segment izdvojen, napravićemo
zamišljene prekide lanca u zglobovima ![]() i
i ![]() (sl.
4.2). Na slici 4.2a prikazan je prekid u zglobu
(sl.
4.2). Na slici 4.2a prikazan je prekid u zglobu ![]() .
Međusobno dejstvo segmenata pokazuje se u obliku parova sila i momenata,
dakle u obliku akcija i reakcija. Ako pod akcijom podrazumevamo dejstvo
narednog segmenta (j) na prethodni (j-1) onda pod reakcijom podrazumevamo
dejstvo prethodnog na naredni. Tako,
.
Međusobno dejstvo segmenata pokazuje se u obliku parova sila i momenata,
dakle u obliku akcija i reakcija. Ako pod akcijom podrazumevamo dejstvo
narednog segmenta (j) na prethodni (j-1) onda pod reakcijom podrazumevamo
dejstvo prethodnog na naredni. Tako,![]() i
i![]() bi
predstavljali reakcije, a
bi
predstavljali reakcije, a ![]() i
i ![]() akcije. Sila
akcije. Sila ![]() momenat
momenat ![]() nekada se
nazivaju ukupnom silom i momentom u zglobu jer predstavljaju ukupno dejstvo
koje se kroz zglob prenosi sa prethodnog segmenta na naredni.
nekada se
nazivaju ukupnom silom i momentom u zglobu jer predstavljaju ukupno dejstvo
koje se kroz zglob prenosi sa prethodnog segmenta na naredni.
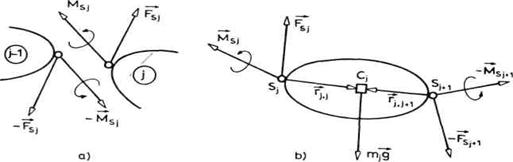
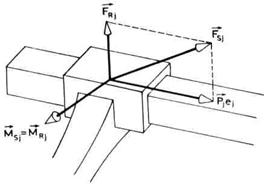
Sl. 4.2. Izdvajanje jednog
segmenta lanca
Ako sada izdvojimo segment
"j", na njega će delovati sile i momenti kako je prikazano na
slici 4.2b. Treba naglasiti da se u sili ![]() i momentu
i momentu![]() sadrži i pogon koji u tom zglobu
deluje. Ako je posmatrani zglob translatorni, tada se pogonska sila
sadrži i pogon koji u tom zglobu
deluje. Ako je posmatrani zglob translatorni, tada se pogonska sila![]() sadrži u sili
sadrži u sili ![]() , a
ako je zglob rotacioni, tada sa
, a
ako je zglob rotacioni, tada sa![]() označavamo
pogonski momenat i on se sadrži u momentu
označavamo
pogonski momenat i on se sadrži u momentu ![]() . Treba
naglasiti da je u pitanju takozvana izlazna sila ili izlazni momenat pogonskog
motora, a ako postoji reduktor, onda se radi o izlaznom momentu reduktora.
Opišimo sada kretanje izdvojenog segmenta "j". Pomeranje
težišta segmenta opisujemo takozvanom teoremom o kretanju
težišta:
. Treba
naglasiti da je u pitanju takozvana izlazna sila ili izlazni momenat pogonskog
motora, a ako postoji reduktor, onda se radi o izlaznom momentu reduktora.
Opišimo sada kretanje izdvojenog segmenta "j". Pomeranje
težišta segmenta opisujemo takozvanom teoremom o kretanju
težišta:
![]() (4.1)
(4.1)
![]() je masa segmenta,
je masa segmenta,![]() ubrzanje težišta, a
ubrzanje težišta, a ![]() ubrzanje Zemljine teže.
ubrzanje Zemljine teže.
Posmatrajmo sada obrtanje tela oko
svog težišta. Položaj težišta na telu i u odnosu na
zglobove prikazan je na slici 4.2b i definisan vektorima![]() i
i![]() kako je već objašnjeno u
poglavlju o geometriji robota (odeljak 2.2.4). Obrtanje opisujemo Ojlerovom
vektorskom jednačinom:
kako je već objašnjeno u
poglavlju o geometriji robota (odeljak 2.2.4). Obrtanje opisujemo Ojlerovom
vektorskom jednačinom:
![]() (4.2)
(4.2)
![]() je ugaono
ubrzanje, a
je ugaono
ubrzanje, a![]() ugaona brzina segmenta. Oznake ~ ukazuje
da su vektori izraženi trima projekcijama na koordinatnom sistemu vezanom
za segment.
ugaona brzina segmenta. Oznake ~ ukazuje
da su vektori izraženi trima projekcijama na koordinatnom sistemu vezanom
za segment.
![]() je tenzor
inercije sračunat za ose vezanog sistema. U opštem slučaju je
je tenzor
inercije sračunat za ose vezanog sistema. U opštem slučaju je
 (4.3)
(4.3)
Međutim, ose vezanog sistema
se najčešće postavljaju u pravcima glavnih osa inercije tela.
Tada tenzor inercija ima dijagonalnu formu
 (4.4)
(4.4)
gde ![]() predstavlja
moment inercije oko ose
predstavlja
moment inercije oko ose ![]() vezanog sistema, a analogno važi za
vezanog sistema, a analogno važi za ![]() i
i ![]() .Na desnoj strani
jednačine (4.2) nalaze se momenti koji su takođe izraženi u
odnosu na vezani sistem segmenta "j".Dogovor o korišćenju
indeksa ~ iznad ili ispod oznake neke veličine ( npr.
.Na desnoj strani
jednačine (4.2) nalaze se momenti koji su takođe izraženi u
odnosu na vezani sistem segmenta "j".Dogovor o korišćenju
indeksa ~ iznad ili ispod oznake neke veličine ( npr. ![]() i
i
![]() ) objašnjen je u odeljku 2.2.4.
Treba naglasiti da je jednačinu (4.1) isto tako moguće napisati u
vezanom sistemu čime bi se postigla jednoobraznost. Druga mogućnost
je da se obe jednačine pišu u spoljašnjem sistemu. Tada (4.1)
ostaje u obliku kakvom je već napisana, a (4.2) se prevodi u
spoljašnji sistem množenjem sa prelaznom matricom
) objašnjen je u odeljku 2.2.4.
Treba naglasiti da je jednačinu (4.1) isto tako moguće napisati u
vezanom sistemu čime bi se postigla jednoobraznost. Druga mogućnost
je da se obe jednačine pišu u spoljašnjem sistemu. Tada (4.1)
ostaje u obliku kakvom je već napisana, a (4.2) se prevodi u
spoljašnji sistem množenjem sa prelaznom matricom ![]() .
.
Sl. 4.3. Sila i momenti u
rotacionom zglobu
U izvedenim vektorskim
jednačinama (4.1) i (4.2) pojavljuju se sila ![]() i
momenat
i
momenat ![]() , tj. ukupna sila i momenat u zglobu.
Razmotrimo detaljnije ove veličine. Posmatrajmo prvo rotacioni zglob (sl.
4.3). Takav zglob dozvoljava samo jedno relativno pomeranje i to obrtanje oko
ose
, tj. ukupna sila i momenat u zglobu.
Razmotrimo detaljnije ove veličine. Posmatrajmo prvo rotacioni zglob (sl.
4.3). Takav zglob dozvoljava samo jedno relativno pomeranje i to obrtanje oko
ose![]() . Otuda sila reakcije
. Otuda sila reakcije ![]() (od
segmenta "j-1" na segment "j") može imati bilo koji
pravac, dok reakcioni momenat
(od
segmenta "j-1" na segment "j") može imati bilo koji
pravac, dok reakcioni momenat ![]() mora biti normalan na osu
mora biti normalan na osu ![]() (tj.
(tj. ![]() ). U rotacionom zglobu
deluje još i pogonski momenat
). U rotacionom zglobu
deluje još i pogonski momenat ![]() ; dakle deluje oko ose
; dakle deluje oko ose![]() . Ukupna sila i momenat u zglobu su sada:
. Ukupna sila i momenat u zglobu su sada:
![]() (4.5a)
(4.5a)
Ranije smo rekli da ![]() predstavlja
reakciju. Međutim, sada smo tu reakciju podelili na reakciju
predstavlja
reakciju. Međutim, sada smo tu reakciju podelili na reakciju ![]() koja je posledica samog
kinematičkog para tj. konstrukcije zgloba i komponentu
koja je posledica samog
kinematičkog para tj. konstrukcije zgloba i komponentu ![]() ,
koje potiče od pogona.
,
koje potiče od pogona.
Ako je posmatrani zglob
"j" translatorni (sl. 4.4) tada je sila reakcije ![]() normalna
na osu
normalna
na osu![]() , a reakcioni momenat
, a reakcioni momenat ![]() može
biti bilo kog pravca. U zglobu deluje i pogonska sila duž ose
translacije:
može
biti bilo kog pravca. U zglobu deluje i pogonska sila duž ose
translacije: ![]() . Ukupna sila i momenat su tada
. Ukupna sila i momenat su tada
![]() (4.5b)
(4.5b)
Jednačine (4.5a) i (4.5b)
možemo napisati na jedinstven način
![]() (4.6)
(4.6)
Sl. 4.4. Sile i momenat u
translatornom zglobu
uvođenjem indikatora ![]() , kojim određujemo tip zgloba (0 za
rotacioni a 1 za translatorni zglob).Vektorske jednačine (4.1) i (4.2)
zajedno sa (4.6) opisuju dinamiku segmenta "j". Ako ove
jednačine napišemo za svaki segment dolazimo do 2n vektorskih
jednačina:
, kojim određujemo tip zgloba (0 za
rotacioni a 1 za translatorni zglob).Vektorske jednačine (4.1) i (4.2)
zajedno sa (4.6) opisuju dinamiku segmenta "j". Ako ove
jednačine napišemo za svaki segment dolazimo do 2n vektorskih
jednačina:
![]() (4.7a)
(4.7a)
 (4.7b)
(4.7b)
koje opisuju dinamiku celog sistema.
U odeljku 2.3.2 (kinematika)
pokazano je kako se ubrzanje težišta (![]() ) i ugaona
brzina i ubrzanje (
) i ugaona
brzina i ubrzanje (![]() ,
,![]() ) mogu izraziti u
zavisnosti od generalisanih koordinata q i njihovih izvoda
) mogu izraziti u
zavisnosti od generalisanih koordinata q i njihovih izvoda ![]() i
i
![]() . Ako to uradimo u sistemu (4.7) nakon
toga nam preostaje da u sistemu izvršimo eliminisanje reakcija
. Ako to uradimo u sistemu (4.7) nakon
toga nam preostaje da u sistemu izvršimo eliminisanje reakcija ![]() ,
,![]() ,j = l,...,n. Analizirajmo
prvo broj jednačina i broj nepoznatih koje treba eliminisati. Sistem (4.7)
sadrži 2n vektorskih, odnosno 6n skalarnih jednačina. Broj vektorskih
reakcija koje treba eliminisati je takođe 2n tj. po dve u svakom zglobu.
Međutim, broj nepoznatih skalarnih komponenata reakcija je 5n tj. po pet
u svakom zglobu. To je zato što ona reakcija koja ima proizvoljan pravac
sadrži tri nezavisne nepoznate skalarne komponente, a ona koja je normalna
na osu zgloba sadrži dve. Sada, nakon eliminacije bn nepoznatih iz 6n
jednačina dobija se sistem n skalarnih jednačina koje ne sadrže
reakcije već samo skalarne vrednosti pogonskih sila i momenata (P1,...,Pn).Postupaka
za eliminisanje reakcija ima više i svaki od njih ima svoje specifičnosti.
Otuda se razlikuju i po brzini rada i utrošku memorijskog prostora
računara. Jedan metod za eliminaciju reakcija izložen je u prilogu
P3.Bez obzira na izabrani pristup formiranju dinamičkog modela, kao
razultat dobijamo sistem n skalarnih diferencijalnih jednačina drugog
reda. Ovaj sistem, odnosno dinamički model može se napisati u obliku
,j = l,...,n. Analizirajmo
prvo broj jednačina i broj nepoznatih koje treba eliminisati. Sistem (4.7)
sadrži 2n vektorskih, odnosno 6n skalarnih jednačina. Broj vektorskih
reakcija koje treba eliminisati je takođe 2n tj. po dve u svakom zglobu.
Međutim, broj nepoznatih skalarnih komponenata reakcija je 5n tj. po pet
u svakom zglobu. To je zato što ona reakcija koja ima proizvoljan pravac
sadrži tri nezavisne nepoznate skalarne komponente, a ona koja je normalna
na osu zgloba sadrži dve. Sada, nakon eliminacije bn nepoznatih iz 6n
jednačina dobija se sistem n skalarnih jednačina koje ne sadrže
reakcije već samo skalarne vrednosti pogonskih sila i momenata (P1,...,Pn).Postupaka
za eliminisanje reakcija ima više i svaki od njih ima svoje specifičnosti.
Otuda se razlikuju i po brzini rada i utrošku memorijskog prostora
računara. Jedan metod za eliminaciju reakcija izložen je u prilogu
P3.Bez obzira na izabrani pristup formiranju dinamičkog modela, kao
razultat dobijamo sistem n skalarnih diferencijalnih jednačina drugog
reda. Ovaj sistem, odnosno dinamički model može se napisati u obliku
 (4.8)
(4.8)
Označavanje ![]() ukazuje
da koeficijent
ukazuje
da koeficijent ![]() predstavlja funkciju generalisanih
koordinata
predstavlja funkciju generalisanih
koordinata![]() , a
, a ![]() ukazuje da je sabirak
ukazuje da je sabirak ![]() funkcija generalisanih koordinata q
i brzina
funkcija generalisanih koordinata q
i brzina ![]() .
.
Sistem (4.8) može se napisati
i u matričnom obliku
![]() (4.9)
(4.9)
gde su matrice sistema jednake:
 (4.10)
(4.10)
a matrica pogona:
 k
k
Naglasimo još jednom ![]() predstavlja pogonski momenat ako je
predstavlja pogonski momenat ako je
![]() rotacioni zglob, a pogonsku silu
ako je zglob translatorni. U svakom slučaju radi se o izlaznom momentu
ili sili motora, a ako postoji reduktor tada se radi o izlaznom momentu
reduktora. Ova diskusija je značajna jer možemo zaključiti da
model (4.9) opisuje dinamiku mehanizma robota ne vodeći računa o
dinamici pogonskih motora. Problem kod ovakvog modela nije samo u njegovoj
teorijskoj nekompletnosti. Važniji je problem u korišćenju
modela. Izlazni momenti motora ne mogu se menjati po želji i nezavisno jer
to nisu ulazne upravljačke veličine već izlazne veličine
koje zavise od ponašanja, odnosno dinamike motora. Ono što
možemo po želji menjati to su ulazni naponi
rotacioni zglob, a pogonsku silu
ako je zglob translatorni. U svakom slučaju radi se o izlaznom momentu
ili sili motora, a ako postoji reduktor tada se radi o izlaznom momentu
reduktora. Ova diskusija je značajna jer možemo zaključiti da
model (4.9) opisuje dinamiku mehanizma robota ne vodeći računa o
dinamici pogonskih motora. Problem kod ovakvog modela nije samo u njegovoj
teorijskoj nekompletnosti. Važniji je problem u korišćenju
modela. Izlazni momenti motora ne mogu se menjati po želji i nezavisno jer
to nisu ulazne upravljačke veličine već izlazne veličine
koje zavise od ponašanja, odnosno dinamike motora. Ono što
možemo po želji menjati to su ulazni naponi ![]() u
slučaju elektromotora i struje servorazvodnika u slučaju
hidrauličnih motora. Promenom ovih upravljačkih veličina treba
ostvariti željeno kretanje robota.Da bi se dobio dinamički model koji
bi vodio računa o kompletnoj dinamici robotskog sistema potrebno je uz
model (4.9) uzeti u obzir i matematičke modele pogonskih motora, kao i
relacije koje pokazuju transformaciju momenata i brzina kroz reduktore (vidi
glavu 3).O ovakvom kompletnom dinamičkom modelu biće reči
nešto kasnije (4.3).Razmotrićemo sada podatke koje je potrebno
poznavati da bi se mogao formirati dinamički model robota. Prvo,
pošto je neophodno rešiti kinematiku robota, to je potrebno poznavati
sve podatke o geometriji kao što je objašnjeno u glavi 2. Podsetimo
sada da pod poznatom geometrijom podrazumevamo poznavanje
u
slučaju elektromotora i struje servorazvodnika u slučaju
hidrauličnih motora. Promenom ovih upravljačkih veličina treba
ostvariti željeno kretanje robota.Da bi se dobio dinamički model koji
bi vodio računa o kompletnoj dinamici robotskog sistema potrebno je uz
model (4.9) uzeti u obzir i matematičke modele pogonskih motora, kao i
relacije koje pokazuju transformaciju momenata i brzina kroz reduktore (vidi
glavu 3).O ovakvom kompletnom dinamičkom modelu biće reči
nešto kasnije (4.3).Razmotrićemo sada podatke koje je potrebno
poznavati da bi se mogao formirati dinamički model robota. Prvo,
pošto je neophodno rešiti kinematiku robota, to je potrebno poznavati
sve podatke o geometriji kao što je objašnjeno u glavi 2. Podsetimo
sada da pod poznatom geometrijom podrazumevamo poznavanje ![]() ,za
svaki segment "j". Svakako, potrebno je znati i tipove zglobova tj.
indikatore
,za
svaki segment "j". Svakako, potrebno je znati i tipove zglobova tj.
indikatore ![]() , j=l,...,n. Za rešavanje dinamike
robota potrebno je poznavati još i inercijalna svojstva segmenata: masu
, j=l,...,n. Za rešavanje dinamike
robota potrebno je poznavati još i inercijalna svojstva segmenata: masu![]() i tenzor inercije
i tenzor inercije ![]() , za
svaki segment "j". Nabrojani podaci predstavljaju karakteristike
samog mehanizma i ne zavise od njegovog kretanja. Da bismo mogli praktično
rešiti bilo direktni bilo inverzni problem dinamike moramo poznavati i
početno stanje sistema tj. početni položaj q(t0) i
početnu brzinu
, za
svaki segment "j". Nabrojani podaci predstavljaju karakteristike
samog mehanizma i ne zavise od njegovog kretanja. Da bismo mogli praktično
rešiti bilo direktni bilo inverzni problem dinamike moramo poznavati i
početno stanje sistema tj. početni položaj q(t0) i
početnu brzinu ![]() (t0).
(t0).
4.2. DIREKTNI I
INVERZNI PROBLEM DINAMIKE
U delu o kinematici uvedeni su
pojmovi direktnog i inverznog problema kine-matike. Ovi pojmovi su bili vezani
za izražavanje kretanja robota preko unutrašnjih i preko spoljašnjih
koordinata, dakle uvedeni su specijalno za probleme robotike. U dinamici
srećemo pojmove direktnog i inverznog problema dinamike, ali ti pojmovi
nisu nužno vezani za robotiku, već se koriste u slučaju bilo kog
mehaničkog sistema. Te pojmove ćemo zato i definisati za proizvoljan
mehanički sistem. Ako posmatramo sistem tela koja se kreću pod
dejstvom određenih sila, tada pod direktnim problemom podrazumevamo
nalaženje sila koje izazivaju neko zadato kretanje sistema. Kod inverznog
problema sile posmatramo kao poznate (zadate) i tražimo kretanje koje
će one izazvati. U robotici, sistem koji posmatramo predstavlja mehanizam
robota i on se kreće pod dejstvom težine i pogonskih sila i momenata.
Kako su težine uvek poznate, to kada govorimo o zadatim silama ili
traženju sila mislimo na sile i momente pogonskih motora,
Formulisaćemo problem preciznije. Pod kretanjem robota
podrazumevaćemo promenu unutrašnjih koordinata, dakle vremensku funkciju
q(t). Pod poznatim pogonima podrazumevaćemo vremensku funkciju P(t). Sada
pod direktnim problemom podrazumevamo nalaženje funkcije P(t) za poznato
q(t), a pod inverznim problemima podrazumevamo nalaženje funkcije q(t) za
poznato P(t).Razmotrimo rešavanje direktnog problema. Prvo ćemo
uočiti osnovnu ideju za proračun. Ako je poznato kretanje q(t), onda
možemo reći da su poznati i izvodi, odnosno unutrašnje brzine
q(t) i unutrašnja ubrzanja q(t). Tada se pogoni mogu dobiti iz relacije
(4.9).
![]() (4.12)
(4.12)
Pošto se ova ideja realizuje
pomoću računara, to stvari stoje nešto drukčije. Funkcija
q(t) nije data analitički već diskretizovano, odnosno nizom vrednosti
koje odgovaraju nizu trenutaka vremena t0,t1,..., tk.
Neka je interval između pojedinih trenutaka jednak Δt. Kako relacija
(4.12) zahteva poznavanje ![]() i
i![]() ,to bi bilo neophodno
sprovesti numeričko diferenciranje, a to je nepoželjan posao. U delu
2.3.4 o direktnom i inverznom problemu kinematike pokazali smo da se
numeričko diferenciranje može izbeći tako što ćemo
kretanje zadati u obliku početnog stanja q(t0),
,to bi bilo neophodno
sprovesti numeričko diferenciranje, a to je nepoželjan posao. U delu
2.3.4 o direktnom i inverznom problemu kinematike pokazali smo da se
numeričko diferenciranje može izbeći tako što ćemo
kretanje zadati u obliku početnog stanja q(t0), ![]() (t0)
i vremenske promene ubrzanja
(t0)
i vremenske promene ubrzanja ![]() (t). Ako primenimo sličnu ideju,
tada će shema rešavanja direktnog problema dinamike izgledati kao na
slici 4.5a.
(t). Ako primenimo sličnu ideju,
tada će shema rešavanja direktnog problema dinamike izgledati kao na
slici 4.5a.
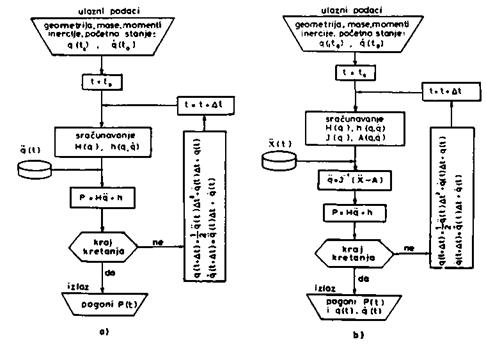
Sl. 4.5. Shema rešavanja
direktnog problema dinamike
U opisanom postupku rešavanja
direktnog problema smatrali smo da je kretanje zadato preko unutrašnjih
koordinata q(t) ili preciznije preko unutrašnjih ubrzanja ![]() (t).
U teoriji kinematike robota (glava 2) ističe se da je kretanje pogodnije
zadati preko spoljašnjih koordinata X(t). Tada se rešavanje direktnog
problema dinamike mora kombinovati sa rešavanjem inverznog problema
kinematike (sl. 4.5b).
(t).
U teoriji kinematike robota (glava 2) ističe se da je kretanje pogodnije
zadati preko spoljašnjih koordinata X(t). Tada se rešavanje direktnog
problema dinamike mora kombinovati sa rešavanjem inverznog problema
kinematike (sl. 4.5b).
Razmotrićemo sada
rešavanje inverznog problema dinamike. On podrazumeva nalaženje
kretanja q(t) ili X(t) ako je poznat zakon promene pogona P(t). U stvari,
potrebno je izvršiti integraciju sistema diferencijalnih jednačina
(4.9). Jedan jednostavni postupak integracije predstavljen je na slici 4.6 i
zasnovan je na ideji da se ubrzanja ![]() smatraju konstantnim na
malom intervalu Δt. Druga mogućnost je da se sistem 4.9 napiše u
obliku
smatraju konstantnim na
malom intervalu Δt. Druga mogućnost je da se sistem 4.9 napiše u
obliku
![]() (4.13)
(4.13)
koji je pogodan za upotrebu bilo
koje od standardnih metoda za numeričku integraciju sistema
diferencijalnih jednačina.
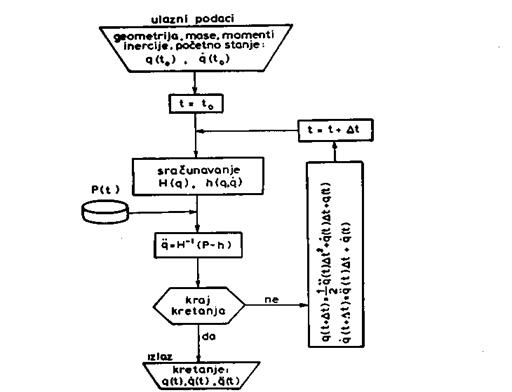
Sl. 4.6. Shema
rešavanja inveiznog problemu dinamike
Korištenjem bilo kog od
spomenuta dva pristupa, dobijamo zakon kretanja u unutrašnjim
koordinatama q(t), unutrašnje brzine![]() (t) i ubrzanja
(t) i ubrzanja![]() (t). Dobijene funkcije su, naravno,
diskretizovane. Ako želimo da nađemo kretanje u spoljašnjim
koordinatama onda je potrebno rešiti još i direktni problem
kinematike.
(t). Dobijene funkcije su, naravno,
diskretizovane. Ako želimo da nađemo kretanje u spoljašnjim
koordinatama onda je potrebno rešiti još i direktni problem
kinematike.
4.3.
KOMPLETAN MODEL DINAMIKE ROBOTA
U odeljku 4.1 naglasili smo da
izvedeni dinamički model (4.9) ne opisuje kompletnu dinamiku robota.
Naime, izveli smo model za mehanizam robota, a nismo uključili dinamiku
pogonskih motora. Sada ćemo izvesti kompletan dinamički model koji
povezuje upravljačke veličine (napon kod motora jednosmerne struje i
struja servorazvodnika kod hidrauličnog motora) sa kretanjem robota
(q(t)).U principu, kompletan dinamički model određenje modelom
mehanizma (4.9) kome se pridružuju modeli motora. Tako, ako se robot pokreće
elektromotorima jednosmerne struje, tada modelu (4.9) pridružujemo model
(3.8) za svaki zglob j=l,...,n. Takođe, potrebno je definisati vezu
koordinata obrtanja motora (![]() ) i koordinata pomeranja zgloba (
) i koordinata pomeranja zgloba (![]() ), dakle prenosni sistem, a zatim i promenu
momenta kroz taj prenos. U odeljku 3.2.3 izveli smo transformaciju kretanja i
pogona kroz prenosni sistem sa reduktorom što je opisano relacijama
(3.13)-(3.15), j=l,...,n. Ukupno, dinamiku robota opisujemo jednačinama:
), dakle prenosni sistem, a zatim i promenu
momenta kroz taj prenos. U odeljku 3.2.3 izveli smo transformaciju kretanja i
pogona kroz prenosni sistem sa reduktorom što je opisano relacijama
(3.13)-(3.15), j=l,...,n. Ukupno, dinamiku robota opisujemo jednačinama:
![]() (4.14)
(4.14)
za mehanizam,
![]() (4.15a)
(4.15a)
![]() (4.15b)
(4.15b)
za pogonske motore
(aktuatori) i
![]() (4.16a)
(4.16a)
![]()
![]() j=1,...,n
(4.16b)
j=1,...,n
(4.16b)
za prenosni sistem (transmisija).
Naglasimo da model SA može
biti i nižeg reda, na primer, drugog reda kao što je dato relacijom
(3.12). Naglasimo takođe da linearnost relacije (4.15a) po naponu ![]() važi samo do određene
granične vrednosti. U opštem slučaju, umesto u pisali bismo
funkciju n(
važi samo do određene
granične vrednosti. U opštem slučaju, umesto u pisali bismo
funkciju n(![]() ) koja predstavlja nelinearnost tipa
zasićenja. Konačno, recimo još da prenos pogona uvek unosi
gubitke, što obično izražavamo kroz koeficijent korisnog dejstva
(relacija (3.17)).Ako se robot pokreće hidrauličnim pogonom tada
modelu mehanizma (4.9) pridružujemo model (3.20)-(3.23) ili model (3.27).
Prenos pogona ovde može biti prilično raznolik. Kod obrtnih motora
veza se može svesti na oblik (3.13) - (3.15) odnosno na (4.16).
Međutim, kod hidrauličnog cilindra veza između pomeranja klipa (
) koja predstavlja nelinearnost tipa
zasićenja. Konačno, recimo još da prenos pogona uvek unosi
gubitke, što obično izražavamo kroz koeficijent korisnog dejstva
(relacija (3.17)).Ako se robot pokreće hidrauličnim pogonom tada
modelu mehanizma (4.9) pridružujemo model (3.20)-(3.23) ili model (3.27).
Prenos pogona ovde može biti prilično raznolik. Kod obrtnih motora
veza se može svesti na oblik (3.13) - (3.15) odnosno na (4.16).
Međutim, kod hidrauličnog cilindra veza između pomeranja klipa (![]() ) i pomeranja zgloba (
) i pomeranja zgloba (![]() )
može biti direktna (
)
može biti direktna (![]() =
= ![]() ) ali može biti i
posredna: linearna (
) ali može biti i
posredna: linearna (![]() = r
= r![]() ) ili nelinearna (
) ili nelinearna (![]() = f(
= f(![]() )). Slično
važi i za odnos momenata.
)). Slično
važi i za odnos momenata.
Razmotrimo sada mogućnost da
se ukupni dinamički model napiše u kompaktnoj formi. Smatraćemo
da se model svakog pogonskog sistema može uz određena
uprošćenja linearizovati i opisati jednačinom (4.15a). Red
modela tj. dimenzija vektora ![]() neka je
neka je ![]() , a vektor
sadrži određene promenljive koje definišu stanje sistema.
, a vektor
sadrži određene promenljive koje definišu stanje sistema. ![]() predstavlja upravljačku
promenljivu koja odgovara posmatranom pogonskom sistemu, a
predstavlja upravljačku
promenljivu koja odgovara posmatranom pogonskom sistemu, a ![]() izlazni
pogon (momenat ili sila). Dalje, radi jednostavnosti izvođenja
pretpostavimo direktnu vezu pomeranja motora i pomeranja zgloba (
izlazni
pogon (momenat ili sila). Dalje, radi jednostavnosti izvođenja
pretpostavimo direktnu vezu pomeranja motora i pomeranja zgloba (![]() = 1
u (4.16)) što ne umanjuje opštost jer se prenosni odnos lako
može ugraditi u model.
= 1
u (4.16)) što ne umanjuje opštost jer se prenosni odnos lako
može ugraditi u model.
Sledeći relaciju (4.13),
model mehanizma SM napišemo u obliku
![]() (4.17)
(4.17)
gde je ![]() = q,
= q, ![]() =
= ![]()
![]() .
.![]() je kolona vektor stanja mehanizma i
dimenzija mu je 2n(4.17) se dalje može napisati u obliku
je kolona vektor stanja mehanizma i
dimenzija mu je 2n(4.17) se dalje može napisati u obliku
![]() (4.18)
(4.18)
gde je
![]() (4.19)
(4.19)
Posmatrajmo ponovo motore. Neka se
![]() elemenata vektora
elemenata vektora ![]() poklapa
sa elementima vektora ξ tj.
poklapa
sa elementima vektora ξ tj. ![]() koordinata stanja
motora "j" je već sadržano u vektoru stanja mehanizma. Na
primer, obrtanje motora (
koordinata stanja
motora "j" je već sadržano u vektoru stanja mehanizma. Na
primer, obrtanje motora (![]() ) i brzina
) i brzina ![]() se po
pretpostavci poklapaju sa
se po
pretpostavci poklapaju sa ![]() i
i ![]() i uključeni
su u ξ. Tada bi bilo
i uključeni
su u ξ. Tada bi bilo
![]() i
i ![]() k
k
popunjen ceo vektor ξ.
Napišimo sada model SA tj.
(4.15a) u kompaktnoj formi:
![]() (4.20)
(4.20)
gde je kolona vektor stanja ![]() dimenzije
dimenzije ![]() . Dalje je
. Dalje je![]()
![]() ,
C=diag[C1...Cn], F = diag[
,
C=diag[C1...Cn], F = diag[![]() ], D = diag[
], D = diag[![]() ]. Uočimo da je ceo vektor ξ
uključen u
]. Uočimo da je ceo vektor ξ
uključen u ![]() pa
pa ![]() definiše
ukupno stanje robota. Ujedinimo sada modele SM i SA tj (4.14) i (4.20). Uvedimo
prvo matricu
definiše
ukupno stanje robota. Ujedinimo sada modele SM i SA tj (4.14) i (4.20). Uvedimo
prvo matricu ![]() dimenzije 1 x
dimenzije 1 x ![]() takvu
da je
takvu
da je![]() . Na primer,
. Na primer,![]() ako je
ako je ![]() određeno sa (4.15b) i
određeno sa (4.15b) i ![]() Sada iz (4.14) sledi
Sada iz (4.14) sledi
![]() (4.21)
(4.21)
gde je T=diag [Ti...rn]. Zamenom x
iz (4.20) i (4.21) dobija se
![]() (4.22)
(4.22)
gde je En
jedinična matrica dimenzije n x n. Zamenimo sada P iz (4.22) u (4.20).
Čime dobijamo kompletni model dinamike robota u obliku
![]() (4.23)
(4.23)
Matrice sistema su
![]()
![]() (4.24)
(4.24)
i dimenzije su im N![]() l i
N
l i
N![]() n respektivno.
n respektivno.
Očigledno da sada pojam
direktnog i inverznog problema dinamike treba preformulisati. Direktni problem
podrazumeva nalaženje upravljanja u (t) koje je potrebno da bi se
ostvarilo zadato kretanje robota, a inverzni problem podrazumeva
nalaženje kretanja ukoliko je poznato upravljanje. Ovo drugo nazivamo
simulacijom.
4.4. PRIMENA
RAČUNARA ZA PRORAČUN DINAMIKE
Iz dosadašnjeg izlaganja o formiranju matematičkog modela dinamike robota možemo zaključiti da se teško može izvršiti ručno sastavljanje takvog modela. Ovaj zaključak trebalo bi obrazložiti. Postupak za formiranje diferencijalnih jednačina kretanja omogućava, u principu, da se jednačine napišu ručno. Međutim, takav pristup ima mnogo nedostataka. Prvo, jako je velika mogućnost grešaka pri tako složenom izvođenju. Drugo, ako se matematički model i formira bez greške, on će biti veoma kabast i nepodesan za upotrebu. Iste mane pojaviće se ako se za ručno formiranje modela izabere bilo koji drugi mehanički pristup. Otuda se javlja ideja da se ceo taj složeni posao formiranja i rešavanja matematičkog modela robota prebaci na računar. Postupak za formiranje matematičkog modela formuliše se tako da ima rekurzivni karakter, te je veoma prikladan za primenu na računaru (vidi prilog P3). Objasnimo sada ideju primene računara za rešavanje dinamike.
Posmatrajmo matematički model
(4.9). Matrice modela H(q) i h( q,![]() ) mogu se posmatrati
kao analitički izrazi koji određuju zavisnost od q, odnosno od q i
) mogu se posmatrati
kao analitički izrazi koji određuju zavisnost od q, odnosno od q i ![]() . S druge strane možemo H(q) i h(q,
. S druge strane možemo H(q) i h(q, ![]() ) tretirati kao složene
računarske postupke kojima se izračunava brojna vrednost H
polazeći od brojno poznatog q i, takođe, brojna vrednost h,
polazeći od q i
) tretirati kao složene
računarske postupke kojima se izračunava brojna vrednost H
polazeći od brojno poznatog q i, takođe, brojna vrednost h,
polazeći od q i ![]() . Tako, kompletne analitičke izraze
za matematički model na ovaj način nećemo dobiti, ali postupci
za brojno sračunavanje matrica modela dovoljni su za rešavanje direktnog
i inverznog problema dinamike. Prvi računarski postupci za proračun
dinamike bili su zasnovani na ovakvom postupku. Oni su omogućili Siru
primenu računara u robotici.
. Tako, kompletne analitičke izraze
za matematički model na ovaj način nećemo dobiti, ali postupci
za brojno sračunavanje matrica modela dovoljni su za rešavanje direktnog
i inverznog problema dinamike. Prvi računarski postupci za proračun
dinamike bili su zasnovani na ovakvom postupku. Oni su omogućili Siru
primenu računara u robotici.
Opisani numerički pristup ima
i svoje nedostatke. Sheme na slikama 4.5 i 4.6 pokazuju da je sračunavanje
matrica H i h neophodno izvršiti ponovo kada god se promene vrednosti q i ![]() , dakle u svakom koraku integracije. Pri
takvom računu svaki put će se iznova sračunavati i mnoge
veličine koje ne zavise od q i
, dakle u svakom koraku integracije. Pri
takvom računu svaki put će se iznova sračunavati i mnoge
veličine koje ne zavise od q i ![]() i koje se nisu
menjale. Očigledno, ponešto će se nepotrebno računati jer
se moglo izračunati samo jednom, na početku. U svakom slučaju,
opisani numerički pristup ne omogućava da se u proračunu izdvoje
ti elementi koji ne zavise od q i
i koje se nisu
menjale. Očigledno, ponešto će se nepotrebno računati jer
se moglo izračunati samo jednom, na početku. U svakom slučaju,
opisani numerički pristup ne omogućava da se u proračunu izdvoje
ti elementi koji ne zavise od q i ![]() od onih koji
zavise i koji se moraju računati za svaki trenutak vremena ponovo. Zato se
došlo na ideju da se odustane od numeričkog modela i da se vrati na
analitičke izraze H(q) i h(q,
od onih koji
zavise i koji se moraju računati za svaki trenutak vremena ponovo. Zato se
došlo na ideju da se odustane od numeričkog modela i da se vrati na
analitičke izraze H(q) i h(q, ![]() ). Ovo lici na povratak
ručnom pisanju modela, međutim, u ovom novom pristupu analitičke
izraze sastavlja računar. U dobijenim izrazima lako se izdvajaju elementi
koji ne zavise od q i
). Ovo lici na povratak
ručnom pisanju modela, međutim, u ovom novom pristupu analitičke
izraze sastavlja računar. U dobijenim izrazima lako se izdvajaju elementi
koji ne zavise od q i ![]() i koji se mogu izračunati samo
jednom, na početku. Ovakav pristup se obično naziva simboličkim
modelom.Računarski postupci za formiranje i rešavanje dinamičkog
modela omogućili su da se konačno sretnu teorija i praksa robotike.
Do tada, teorija se razvijala pretežno akademski, bez ozbiljnije primene,
a praksa je napredovala nezavisno, oslanjajući se na znanja iz oblasti
automatskog upravljanja. Jasno je da je takva praksa imala svoje granice preko
kojih nije mogla preći bez celovitije teorije robota. Primena računara
za rešavanje kinematike i dinamike omogućila je da se prevaziđu
nedostaci teorije robotike i ona postane upotrebljiva u praksi.Ovakva,
računarski orijentisana kinematika i dinamika iskorisćene su s jedne
strane za razradu savršenijih metoda upravljanja robotima, a s druge
strane za razvoj metoda računarskog projektovanja robota. Kako ćemo
se upravljanjem baviti u posebnoj glavi ove knjige, to ćemo ovde obratiti
pažnju na mogućnosti primene dinamike i računara u procesu
projektovanja mehanizma i pogonskog sistema robota.
i koji se mogu izračunati samo
jednom, na početku. Ovakav pristup se obično naziva simboličkim
modelom.Računarski postupci za formiranje i rešavanje dinamičkog
modela omogućili su da se konačno sretnu teorija i praksa robotike.
Do tada, teorija se razvijala pretežno akademski, bez ozbiljnije primene,
a praksa je napredovala nezavisno, oslanjajući se na znanja iz oblasti
automatskog upravljanja. Jasno je da je takva praksa imala svoje granice preko
kojih nije mogla preći bez celovitije teorije robota. Primena računara
za rešavanje kinematike i dinamike omogućila je da se prevaziđu
nedostaci teorije robotike i ona postane upotrebljiva u praksi.Ovakva,
računarski orijentisana kinematika i dinamika iskorisćene su s jedne
strane za razradu savršenijih metoda upravljanja robotima, a s druge
strane za razvoj metoda računarskog projektovanja robota. Kako ćemo
se upravljanjem baviti u posebnoj glavi ove knjige, to ćemo ovde obratiti
pažnju na mogućnosti primene dinamike i računara u procesu
projektovanja mehanizma i pogonskog sistema robota.
U odeljku 4.2 opisan je
računarski postupak za rešavanje direktnog problema dinamike.
Postupak omogućava da se, polazeći od željenog kretanja
izraženog preko spoljašnjih koordinata X(t), izračuna promena
unutrašnjih koordinata q(t), brzina ![]() (t) kao i potrebni
pogonski momenti P(t). Ovi podaci već sami po sebi mogu biti korisni, a na
osnovu jednačina koje opisuju kinematiku i dinamiku robota moguće je
izračunati i niz drugih karakteristika. Moguće je odrediti sve
reakcije u zglobovima, a zatim za svaki od segmenata naći raspodelu sila
koje na njega deluju. Odatle se dobijaju mehanički naponi u materijalu
(npr. naponi savijanja i uvijanja). Sledeći korak je proračun
elastičnih deformacija. Proračun deformacija može biti
uprošćen jer bi egzaktno tretiranje zbog tog problema vodilo ka
elastodinamici koju najčešće moramo rešavati primenom
metode konačnih elemenata. U svakom slučaju proračun napona i
deformacija služiće nam kao osnova za projektovanje dimenzija
robota.Proračunom dinamike robota dobija se niz karakteristika potrebnih
za izbor pogonskih motora. Pored potrebnih momenata i brzina lako možemo sračunati
potrebnu snagu, a takođe formirati dijagram brzina-momenat (P-
(t) kao i potrebni
pogonski momenti P(t). Ovi podaci već sami po sebi mogu biti korisni, a na
osnovu jednačina koje opisuju kinematiku i dinamiku robota moguće je
izračunati i niz drugih karakteristika. Moguće je odrediti sve
reakcije u zglobovima, a zatim za svaki od segmenata naći raspodelu sila
koje na njega deluju. Odatle se dobijaju mehanički naponi u materijalu
(npr. naponi savijanja i uvijanja). Sledeći korak je proračun
elastičnih deformacija. Proračun deformacija može biti
uprošćen jer bi egzaktno tretiranje zbog tog problema vodilo ka
elastodinamici koju najčešće moramo rešavati primenom
metode konačnih elemenata. U svakom slučaju proračun napona i
deformacija služiće nam kao osnova za projektovanje dimenzija
robota.Proračunom dinamike robota dobija se niz karakteristika potrebnih
za izbor pogonskih motora. Pored potrebnih momenata i brzina lako možemo sračunati
potrebnu snagu, a takođe formirati dijagram brzina-momenat (P-![]() ). Ovakav dijagram može se
uporedivati sa kataloškim karakteristikama motora. Na opisani model
dinamike robota lako se dodaje modul za proračun grejanja i prenosa
toplote u motorima.Moguće je izračunati još neke dinamičke
karakteristike kao što je utrošak energije itd. Tako dolazimo do
zaključka da raspolažemo postupkom koji omogućava da se zada
željena konfiguracija robota (dimenzije, mase, itd.) i željeni
manipu-lacioni zadatak, a kasnije izračuna niz dinamičkih
karakteristika. Takav postupak nazivamo algoritmom za dinamičku analizu.
Ovaj algoritam, u vidu računarskog programa, predstavlja korisnu alatku u
procesu projektovanja robota. Projektant može brzo proanalizirati
veći broj različitih konfiguracija robota radi izbora najpovoljnije.
Može i menjati pojedine dimenzije i druge parametre da bi uočio
uticaj tih promena na važne dinamičke karakteristike. Sve ovo
omogućava brže i uspešnije projektovanja.Sledeći korak u
korišćenju računara za projektovanje robota je formiranje takozvanog
interaktivnog postupka projektovanja i odgovarajućeg programskog pa-keca.
Cilj nam je da za postavljeni manipulacioni zadatak odaberemo konfiguraciju
robota (dimenzije, motore itd.) koja će zadovoljiti sve postavljene
zahteve i sva ograničenja. Kao prime ograničenja možemo navesti
uslov da elastična deformacija segmenata robota bude manja od dozvoljene
vrednosti. Shema programa prikazana je na slici 4.7. Postupak kreće od
neke zadate početne konfiguracije robora. Izvrši se dinamička
analiza i testiranje izračunatih dinamičkih karakteristika. Ukoliko
su svi testovi pozitivni, dakle sva ograničenja zadovoljena, onda je
posmatrana konfigracija dobra. Ako pak neki test bude negativan, dakle neko od
ograničenja ne bude zadovoljeno, računar će štampati
odgovarajuću poruku kao i preporuke za izmene konfiguracije koje će
popraviti negativni test. Programski paket sadrži i posebne konunikacione
potprograme koji omogućavaju projektantu jednostavnu izmenu pojedinih
podataka o konfiguraciji robota. Nakon što je projektant uveo korekcije
konfiguracije, postupak kreće od početka tj. vrši novu
dinamičku analizu i testiranje. Takav ciklus se ponavlja sve dok se
konačno ne dođe do konfiguracije koja zadovoljava sve zahteve i sva
ograničenja, a to će biti onda kada svi testovi budu pozitivni.
). Ovakav dijagram može se
uporedivati sa kataloškim karakteristikama motora. Na opisani model
dinamike robota lako se dodaje modul za proračun grejanja i prenosa
toplote u motorima.Moguće je izračunati još neke dinamičke
karakteristike kao što je utrošak energije itd. Tako dolazimo do
zaključka da raspolažemo postupkom koji omogućava da se zada
željena konfiguracija robota (dimenzije, mase, itd.) i željeni
manipu-lacioni zadatak, a kasnije izračuna niz dinamičkih
karakteristika. Takav postupak nazivamo algoritmom za dinamičku analizu.
Ovaj algoritam, u vidu računarskog programa, predstavlja korisnu alatku u
procesu projektovanja robota. Projektant može brzo proanalizirati
veći broj različitih konfiguracija robota radi izbora najpovoljnije.
Može i menjati pojedine dimenzije i druge parametre da bi uočio
uticaj tih promena na važne dinamičke karakteristike. Sve ovo
omogućava brže i uspešnije projektovanja.Sledeći korak u
korišćenju računara za projektovanje robota je formiranje takozvanog
interaktivnog postupka projektovanja i odgovarajućeg programskog pa-keca.
Cilj nam je da za postavljeni manipulacioni zadatak odaberemo konfiguraciju
robota (dimenzije, motore itd.) koja će zadovoljiti sve postavljene
zahteve i sva ograničenja. Kao prime ograničenja možemo navesti
uslov da elastična deformacija segmenata robota bude manja od dozvoljene
vrednosti. Shema programa prikazana je na slici 4.7. Postupak kreće od
neke zadate početne konfiguracije robora. Izvrši se dinamička
analiza i testiranje izračunatih dinamičkih karakteristika. Ukoliko
su svi testovi pozitivni, dakle sva ograničenja zadovoljena, onda je
posmatrana konfigracija dobra. Ako pak neki test bude negativan, dakle neko od
ograničenja ne bude zadovoljeno, računar će štampati
odgovarajuću poruku kao i preporuke za izmene konfiguracije koje će
popraviti negativni test. Programski paket sadrži i posebne konunikacione
potprograme koji omogućavaju projektantu jednostavnu izmenu pojedinih
podataka o konfiguraciji robota. Nakon što je projektant uveo korekcije
konfiguracije, postupak kreće od početka tj. vrši novu
dinamičku analizu i testiranje. Takav ciklus se ponavlja sve dok se
konačno ne dođe do konfiguracije koja zadovoljava sve zahteve i sva
ograničenja, a to će biti onda kada svi testovi budu pozitivni.
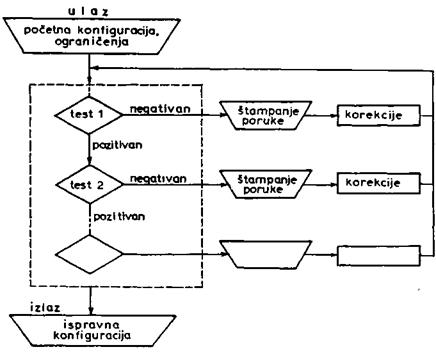
Sl. 4.7. Algoritam za
interaktivno projektovanje
Krajnji korak u korišćenju računara u projektovanju robota je formiranje postupka i programskog paketa koji bi na osnovu postavljenih zahteva vršio automatski izbor najpovoljnije konfiguracije robota. Ovaj postupak podrazumeva definisanje nekog kriterijuma optimalnosti i razvoj pogodnih metoda optimizacije.
Ovim bismo zaključili
naše izlaganje ideja računarskog projektovanja u robo-tici. Opisane
postupke dopunjavamo i programima za simulaciju i grafičko prikazivanje
čime kompletiramo programski paket za računarsko projektovanje.
4.5. DINAMIKA
ROBOTA SA OGRANIČENIM KRETANJEM HVATALJKE
Ovaj odeljak obrađuje
dinamiku robota čija hvataljka ne može da se kreće proizvoljno u
prostoru, već su joj nametnute određena ograničenja. Pri ovome
naglasimo da pod terminom hvataljka podrazumevamo poslednji segment lanca bez
obzira na završni uređaj koji se tu nalazi. Ovakva ograničenja
nametnuta kretanju hvataljke česta su u nekim fazama izvršenja
robotskog zadatka. Na primer, ako robot treba da piše po nekoj
površini (sl. 4.9) tada hvataljka ne može da se kreće
proizvoljno već se vrh pisaljke prinudno kreće po površini.
Drugi primer bi se mogao naći u zadacima montaže (sl. 4.10 i 4.11).
Ako, robot uvlači neki predmet u otvor tada je kretanje poslednjeg
segmenta (koji u sebe uključuje i predmet) ograničeno na jednu
translaciju i eventualno jedno obrtanje. Konačno, ograničenja se
javljaju i u slučajevima dvoručne ili višeručne
manipulacije (sl. 4.12). Niz drugih primera mogao bi se navesti. U svakom
slučaju jesno je da uvedena ograničenja smanjuju broj stepeni slobode
hvataljke, a takođe, ograničenja izazivaju pojavu sila reakcije veze
koje bitno utiču na dinamiku robota. Ovde ćemo problem tretirati tako
da pokrijemo one slučajeve koji su interesantni za praktičnu primenu.
Sl. 4.8. Mehanizam robota sa silom
i momentom
Posmatrajmo radi uprošćenja robot sa
n = 6 stepeni slobode i smatrajmo da tokom izvršenja za dataka robot ne dolazi u singularne položaje. U tom
slučaju, bez uvedenih ograničenja hvataljke bi takođe imala 6
stepeni slobode. Dinamiku ovakvog mehanizma možemo opisati modelom (4.9).
Radi daljeg izvođenja proširimo posmatranje na robota na čiji
poslednji segment, u zadatoj tački A, deluje sila ![]() i
još deluje spreg momenta
i
još deluje spreg momenta ![]() (Sl.4.8) koji deluju na
hvataljku Tačka A definisana je vektorom
(Sl.4.8) koji deluju na
hvataljku Tačka A definisana je vektorom ![]() . Dinamiku ovakvog mehanizma opisujemo
modelom:
. Dinamiku ovakvog mehanizma opisujemo
modelom:
![]() (4.25)
(4.25)
gde je FA matrica dimenzija 3![]() 1 koja sadrži elemente vektora
1 koja sadrži elemente vektora ![]() , matrica MA (takođe 3
, matrica MA (takođe 3![]() 1)
sadrži vektor
1)
sadrži vektor ![]() (dakle zadržavamo dogovor o
pisanju vektora u obliku 3
(dakle zadržavamo dogovor o
pisanju vektora u obliku 3![]() 1 matrice i obrnuto). DF i DM su
odgovarajuće matrice dimenzija n
1 matrice i obrnuto). DF i DM su
odgovarajuće matrice dimenzija n![]() 3 koje pokazuju uticaj
3 koje pokazuju uticaj ![]() i
i ![]() na generalisane
sile u zglobovima:
na generalisane
sile u zglobovima:
 (4.26)
(4.26)
![]() (4.27)
(4.27)
 (4.28)
(4.28)
Pri posmatranju kretanja sa
ograničenjem, FA i MA će predstavljati reakcije ograničenja
(reakcije veze). U praksi se uvođenje ograničenja
najčešće svodi na kontakt hvataljke sa nepomičnom podlogom
(stacionarno ograničenje) ili pak na kontakt sa nekim telom koje se
kreće po zadatim zakonima i na čije kretanje robot ne utiče
(nestacionarno ograničenje). Ipak, javljaju se i slučajevi kada dinamika
robota utiče i na tela sa kojima je robot u kontaktu (na primer,
dvoručna manipulacija). U svakom slučaju, dobija se struktura
zatvorenog lanca.
4.5.1. Opšta metodologija
uvođenja ograničenja
U poglavlju o kinematici uveden je
vektor spoljašnjih koordinata koji, u slučaju n- 6, sadrži
sledeće komponente.
![]() (4.29)
(4.29)
Ovaj vektor povezan je sa
unutrašnjim koordinatama preko Jakobijeve forme (2.56):
![]() (4.30)
(4.30)
Ako uvedemo ograničenje na
kretanje hvataljke tada će se smanjiti broj stepeni slobode. Neka je ![]() ,ovaj smanjeni broj.Obično govorimo
o redukovanom broju stepeni slobode hvataljke. Dakle, posmatramo
ograničenje koje ukida
,ovaj smanjeni broj.Obično govorimo
o redukovanom broju stepeni slobode hvataljke. Dakle, posmatramo
ograničenje koje ukida ![]() stepeni slobode pri čemu je
stepeni slobode pri čemu je ![]() = n-
= n-![]() . Za
definisanje položaja hvataljke sada uvodimo
. Za
definisanje položaja hvataljke sada uvodimo ![]() nezavisnih
parametara
nezavisnih
parametara ![]() koji formiraju takozvani redukovani
vektor položaja
koji formiraju takozvani redukovani
vektor položaja
![]() (4.31)
(4.31)
Najčešće se
parametri ![]() uvode tako da određuju
relativni položaj hvataljke u odnosu na uvedeno ograničenje. Vektor
spoljašnjih koordinata X moguće je povezati sa redukovanim vektorom
položaja
uvode tako da određuju
relativni položaj hvataljke u odnosu na uvedeno ograničenje. Vektor
spoljašnjih koordinata X moguće je povezati sa redukovanim vektorom
položaja ![]() preko nove Jakobijeve forme
preko nove Jakobijeve forme
![]() (4.32)
(4.32)
gde je Jr takozvani redukovani jakobijan dimenzija n×nr, pridružena matrica Ar je dimenzija n×1. Matrice Jr i Ar izvode se iz relacija koje definišu postavljeno ograničenje.
Kombinovanjem (4.30) i (4.32)
dobija se
![]() (4.33)
(4.33)
Ova relacija definiše
kinematiku ograničenog kretanja. Dinamiku ograničenog kretanja
opisujemo modelom (4.25) pri čemu ![]() i
i ![]() predstavljaju
silu reakcije veze i reakcioni momenat. Model možemo napisati
i kompaktnije:
predstavljaju
silu reakcije veze i reakcioni momenat. Model možemo napisati
i kompaktnije:
![]() (4.34)
(4.34)
gde je
![]() (4.35)
(4.35)
šestokomponentni
vektor reakcije, a
![]() (4.36)
(4.36)
je dimenzija n × 6.
Komponente vektora reakcije RA u opštem slučaju nisu
nezavisne, već u zavisnosti od tipa uvedenog ograničenja
zadovoljavaju određene međusobne odnose koji se mogu izraziti
relacijom
![]() (4.37)
(4.37)
gde je E matrica dimenzija (6 - n
+ nr) ×6, koja se izvodi iz izraza koji definišu uvedeno
ograničenje. Sada relacije (4.33), (4.34) i (4.37) definišu
matematički model kinematike i dinamike ograničenog kretanja
mehanizma robota. Ako želimo kompaktniju formu modela zamenićemo ![]() iz (4.33) u (4.34) i dobiti
iz (4.33) u (4.34) i dobiti
![]() (4.38)
(4.38)
Sada ovu realizaciju, zajedno sa
(4.37) možemo napisati u obliku:
 (4.39)
(4.39)
Dobijeni model je dimenzije (nr
+ 6) × (nr + 6). Moguće je, međutim, napisati
još kompaktniju formu. Šestokomponentni vektor reakcije RA
može se izraziti kao linearna funkcija nc nezavisnih
komponenata. Dakle, nezavisnih komponenata ima nc = n-nr,
odnosno onoliko koliko stepeni slobode je "ukinuto" uvođenjem
ograničenja. Sada je
![]() (4.40)
(4.40)
gde RAr vektor
dimenzije n- nr koji sadrži nezavisne reakcije i koji nazivamo
još redukovani vektor reakcije. Matrica G dimenzija (6 ×(n — nr))
izvodi se polazeći od definicionih relacija ograničenja.
Uvođenjem (4.40) u (4.38) dobija se dinamički model
![]() (4.41)
(4.41)
odnosno
![]() (4.42)
(4.42)
Dimenzije blokova u ovom modelu
su:
![]() (4.43)
(4.43)
pa je model dimenzija (n × n).
Razmotrimo prvo rešavanje direktnog problema dinamike. Pod tim terminom ćemo ovde podrazumevati da je zadato kretanje Xr(t) i reakcije RAr(t) koje želimo ostvariti, a traže se odgovarajući pogoni u zglobovima P(t). Očigledno, P se izračunava direktno iz jednačine (4.42).
Inverzni problem podrazumeva
integraciju modela. Zadati su pogoni P(t), a traži se kretanje Xr(t)
i reakcija RAr (t). Model (4.42) omogućava rešavanje
ubrzanja ![]() i reakcija RAr, a time i
integraciju modela.
i reakcija RAr, a time i
integraciju modela.
4.5.2. Tipovi ograničenja
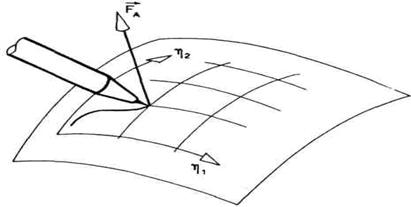
Sl. 4.9. Zadatak pisanja -
ograničenje tipa površine
Razmotrimo tipove ograničenja koji se javljaju u praktičnim problemima. Ovde ćemo glavne tipove ukratko objasniti, a u prilogu P4 izvešćemo dinamički model tj. matrice Jr, Ar, E i G, Za jedan konkretan tip ograničenja - ograničenje u obliku površine.
Jedno od čestih
ograničenja je ograničenje tipa površine (sl. 4.9). Tada je
položaj hvataljke određen sa dva relativna parametra ![]() i
i
![]() koji definišu položaj
vrha pisaljke na površini i tri ugla koji definišu orijentaciju
hvataljke. Uvedeno ograničenje ukinuto je jedan stepen slobode (nc=
1). Redukovani vektor položaja ima komponente Xr =
koji definišu položaj
vrha pisaljke na površini i tri ugla koji definišu orijentaciju
hvataljke. Uvedeno ograničenje ukinuto je jedan stepen slobode (nc=
1). Redukovani vektor položaja ima komponente Xr =![]() i dimenzije je nr = 5. Sto se
tiče reakcija, momenat je jednak nuli (
i dimenzije je nr = 5. Sto se
tiče reakcija, momenat je jednak nuli (![]() = 0), a sila reakcije
= 0), a sila reakcije ![]() mora biti normalna na površinu
(podrazumevajući glatku površinu), pa ima jednu nezavisnu komponentu
(nc = n-nr = 1).
mora biti normalna na površinu
(podrazumevajući glatku površinu), pa ima jednu nezavisnu komponentu
(nc = n-nr = 1).
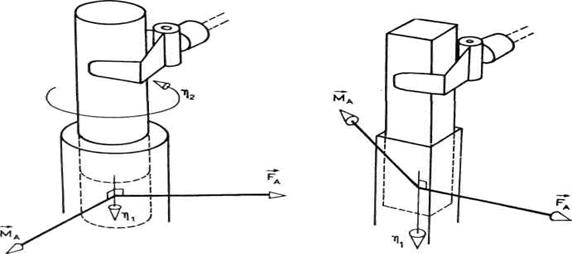
Sl.4.10.Zadatak montaže - ograničenje tipa cilindričnog
para Sl.4.11.Zadatak
montaže - ograničenje tipa translatornog para
Drugi čest slučaj
ograničenja je ograničenje tipa cilindričnog para (sl. 4.10).
Tada hvataljka ima samo dva stepena slobode (nr = 2) jer je
moguća samo translacija duž ose otvora i obrtanje oko te ose. Tim
pomeranjima odgovaraju parametri »7i i »72 koji čine redukovani vektor
položaja: Xr = [![]() ]T. Reakcije
]T. Reakcije ![]() i
i ![]() moraju biti obe
normalne na osu otvora, pa, prema tome, svaka od njih ima po dve nezavisne
komponente. Dakle, nc = n- nr = 4.
moraju biti obe
normalne na osu otvora, pa, prema tome, svaka od njih ima po dve nezavisne
komponente. Dakle, nc = n- nr = 4.
U procesu montaže javlja se i
ograničenje tipa translatornog para (sl. 4.11). Za razliku od prethodnog
slučaja, ovde hvataljka ima samo jedan stepen slobode (uvlačenje) pa
je nr = 1 i redukovani vektor položaja sadrži samo
podužnu koordinatu uvlačenja: Xr = [![]() ]. Sila
reakcije
]. Sila
reakcije ![]() je i dalje normalna na osu otvora,
pa ima dve nezavisne komponente, ali, reakcioni momenat
je i dalje normalna na osu otvora,
pa ima dve nezavisne komponente, ali, reakcioni momenat ![]() može
imati proizvoljan pravac, pa ima tri nezavisne komponente. Dakle,
ukupno ima nc = n - nr = 5 nezavisnih komponenata
reakcije.
može
imati proizvoljan pravac, pa ima tri nezavisne komponente. Dakle,
ukupno ima nc = n - nr = 5 nezavisnih komponenata
reakcije.
Sl. 4.12. Dvoručna
manipulacija
Još niz tipova ograničenja možemo nabrojati, međutim, ovde ćemo spomenuti još samo jedan specijalan slučajdvoručnu manipulaciju. Na slici 4.12 prikazana su dva robota koji obavljaju zadatak montaže. Tokom izvršenja zadataka njihove hvataljke su povezane cilindričnim parom.Kada govorimo o kretanju robota sa ograničenjem nametnutim na kretanje hvataljke, neophodno je spomenuti i pitanje sudara. Naime, pri nailasku na ograničenje tj. pri pre lasku sa slobodnog na ograničeno kretanje dolazi do sudarnog efekta. Sudar se, u opštem slučaju, rešava primenom
teoreme o količini kretanja i
teoreme o kinetičkom momentu (vidi prilog P4). Jedan slučaj
kretanja robota sa ograničenjem obrađen je i prilogom na kraju
knjige.
4.6.DINAMIKA
ROBOTA SA ELASTIČNIM PRENOSOM POGONA
U odeljku 3.2.3 gde je govoreno o prenosu pogonskog momenta od motora do zgloba videli smo da se često projektuje prilično složen prenosni sistem i da se često pogonski momenat prenosi na relativno veliku daljinu. Obično se radilo o prenosu osovinom ili lancem, a skoro uvek je u prenosni sistem uključen reduktor.
Pri pisanju relacija kojima
opisujemo prenosni sistem smatralo se da je takav sistem nedeformabilan. Tako
se došlo do relacija (3.13) - (3.15) koje su korišćene i kasnije
u dinamici (relacija (4.16). Dakle, obrtanje zgloba (qj) direktno je
sledilo iz obrtanja motora (![]() ). Međutim, prenosni sistem nikada
ne može biti u potpunosti krut. Naime, uvek postoje elastične
deformacije, pa možemo reći da je relacija (4.16) aproksimativna i da
važi tek za dovoljno krut prenos. Sada se postavlja pitanje šta
znači "dovoljno krut" prenos. Mehanička krutost elemenata
prenosnog sistema jeste velika i najčešće je aproksimacija
(4.16) opravdana. Međutim, u nekim preciznim proračunima deformacije
u prenosu se moraju uzeti u obzir. Uzmimo na primer deformaciju istezanja
prenosnog lanca ili deformaciju uvijanja cevastog dela harmonik-drajv
reduktora. Zato ovde pokazujemo, na nešto uprošćenom primeru,
kako izgleda dinamički model robota sa elastičnim prenosnim sistemom.
Na sličan način može se analizirati i prenos sa složenijom
elastičnom deformacijom tj. sa više deformabilnih elemenata. Kako se
radi i o dinamici motora i o dinamici mehanizma, to će dobijeni model
predstavljati kompletni model dinamike. Prilikom izvođenja kompletnog
dinamičkog modela (odeljak 4.3) opisali smo mehanizam modelom (4.14),
motore modelom (4.15), a prenosni sistem relacijama (4.16a) i (4.16b). U
slučaju deformabilnog elastičnog prenosa modeli mehanizma i motora se
ne menjaju. Menjaju se, međutim, relacije koje opisuju prenos. Neka je
prenosni sistem takav kakav je prikazan na slici 4.13. i neka je jedini
elastični elemenat osovina Aj'Aj''. Konstantu
torzione krutosti označimo sa
). Međutim, prenosni sistem nikada
ne može biti u potpunosti krut. Naime, uvek postoje elastične
deformacije, pa možemo reći da je relacija (4.16) aproksimativna i da
važi tek za dovoljno krut prenos. Sada se postavlja pitanje šta
znači "dovoljno krut" prenos. Mehanička krutost elemenata
prenosnog sistema jeste velika i najčešće je aproksimacija
(4.16) opravdana. Međutim, u nekim preciznim proračunima deformacije
u prenosu se moraju uzeti u obzir. Uzmimo na primer deformaciju istezanja
prenosnog lanca ili deformaciju uvijanja cevastog dela harmonik-drajv
reduktora. Zato ovde pokazujemo, na nešto uprošćenom primeru,
kako izgleda dinamički model robota sa elastičnim prenosnim sistemom.
Na sličan način može se analizirati i prenos sa složenijom
elastičnom deformacijom tj. sa više deformabilnih elemenata. Kako se
radi i o dinamici motora i o dinamici mehanizma, to će dobijeni model
predstavljati kompletni model dinamike. Prilikom izvođenja kompletnog
dinamičkog modela (odeljak 4.3) opisali smo mehanizam modelom (4.14),
motore modelom (4.15), a prenosni sistem relacijama (4.16a) i (4.16b). U
slučaju deformabilnog elastičnog prenosa modeli mehanizma i motora se
ne menjaju. Menjaju se, međutim, relacije koje opisuju prenos. Neka je
prenosni sistem takav kakav je prikazan na slici 4.13. i neka je jedini
elastični elemenat osovina Aj'Aj''. Konstantu
torzione krutosti označimo sa ![]() , a konstantu
prigušenja sa
, a konstantu
prigušenja sa ![]() .
.
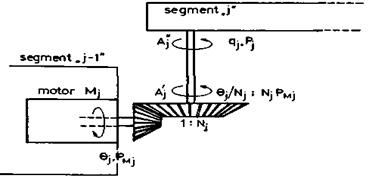
Sl. 4.13.
Uprošćeni sistem za prenos pogona
Moment motora ![]() predstavlja
ulazni momenat za zupčast par. Nakon zupčastog para (zanemarujući
njegovu inerciju) dobija se momenat
predstavlja
ulazni momenat za zupčast par. Nakon zupčastog para (zanemarujući
njegovu inerciju) dobija se momenat ![]() koji se osovinom Aj'Aj"
prenosi na zglob. Ako se zanemari inercija osovine onda je
koji se osovinom Aj'Aj"
prenosi na zglob. Ako se zanemari inercija osovine onda je
![]() (4.44)
(4.44)
tj. relacija (4.16a) važi i u
slučaju elastičnog prenosa. Međutim, usled elastične
deformacije osovine Aj'Aj'' koordinata obrtanja motora![]() i koordinata obrtanja zgloba
i koordinata obrtanja zgloba ![]() postaju međusobno nezavisne. Time se
broj generalisanih koordinata povećava za n(
postaju međusobno nezavisne. Time se
broj generalisanih koordinata povećava za n(![]() ,j =
l,...,n), a broj promenljivih stanja za 2n(
,j =
l,...,n), a broj promenljivih stanja za 2n(![]() ,
,![]() , j
= 1...., n).
, j
= 1...., n).
Relacija (4.16b) očigledno
više ne vazi, jer se pojavljuje uvijanje tj. ugaona deformacija ![]() . Relacija (4.16a) tj. (4.44), mada
važi, ne primenjuje se u tom obliku. Momenat koji vrši elastičnu
deformaciju može se napisati u obliku
. Relacija (4.16a) tj. (4.44), mada
važi, ne primenjuje se u tom obliku. Momenat koji vrši elastičnu
deformaciju može se napisati u obliku
![]() (4.45)
(4.45)
Sada model mehanizma (4.14)
postaje
![]() (4.46)
(4.46)
gde je
![]() (4.47)
(4.47)
![]() (4.48)
(4.48)
Model motora (4.15) postaje
 (4.49)
(4.49)
Sada (4.46) i (4.49) određuju
kompletan model dinamike robota. Ukupan broj koordinata stanja je
5n ( ![]()
![]() ,
,![]() ,j =
l,...,n).
,j =
l,...,n).