Prethodno poglavlje | Pocetna
strana | Sledece poglavlje
1. UVOD U
ROBOTIKU
U današnje vreme svet se
suočava sa ubrzanim razvojem nauke i tehnike i nalazi se u jednoj od faza
koje često nazivamo fazama revolucionarnih pro![]() mena.
Slične primere nalazimo i ranije kroz istoriju. Razvoj tehnike i sredstava
za proizvodnju nije bio ravnomeran. Smenjivali su se periodi ubrzanog razvoja i
relativne stagnacije. Najpoznatiji skok u razvoju, poznat pod imenom
industrijska revolucija, nastupio je krajem osamnaestog i početkom
devetnaestog veka. Počelo je 1733. godine sa pojavom mehanizovanog
razboja za tkanje. Sledeći veliki pronalazak bila je parna mašina
(1769), a zatim je nastupio buran razvoj tehnike i sredstava za proizvodnju,
odakle je i potekao naziv industrijska revolucija. Istorijski gledano, postoji
još niz pronalazaka i naučnih dostignuća koji su bitno
obeležili tehnički razvoj sveta u određenim periodima.
Spomenućemo otkriće i kasnije korišćenje atomske energije,
kao i otkriće tranzistora koji je omogućio nagli razvoj elektronike.
Svedoci smo ubrzanog razvoja nauke i tehnike. Razvoj nauke i novih tehnologija,
po mišljenjima mnogih, nagoveštavaju kvalitativne promene u oblasti
proizvodnje i društvu uopšte. Brzi razvoj računarskih i
komunikacionih sistema omogućava izrazito povećanje protoka
informacija, a visoka automatizacija u industriji sve više stavlja
čoveka u položaj samo nadgledanja proizvodnje. Shvativši
značaj i perspektive ovih procesa, razvijene zemlje odvajaju sve veća
sredstva za naučnoistraživački rad i razvoj visokih tehnologija.
Naravno, velika ulaganja značajno ubrzavaju procese razvoja. Izgleda da je
opravdano govoriti o novoj tehnološkoj revoluciji i prelasku razvijenih
zemalja u novu eru post-industrijskog društva. Jedan od bitnih
činilaca nove revolucije je fleksibilna automatizacija čiji
ne-razdvojni deo predstavljaju robotski sistemi. Ideja o robotima nastala je
prvo u naučnoj fantastici. I danas, u diskusijama o robotskim sistemima i
svemu što oni donose teško možemo izbeći vizije iz oblasti
naučne fantastike. Naravno, na robote danas gledamo mnogo
praktičnije, jer nam stupanj razvoja tehnike to omogućava. To su
veoma složeni uređaji koji su se mogli pojaviti kada su se razvile
one grane nauke na kojima se današnja robotika zasniva: teorija
mašina, teorija automatskog upravljanja, računarska tehnika, metode
tzv. veštačke inteligencije, kao i tehnologija senzora i
pretvarača. Na robote danas gledamo kao na uređaje koji
omogućavaju dalju i fleksibilniju automatizaciju. Oni zamenjuju
čoveka prvenstveno na opasnim, monotonim i teškim poslovima.
Čoveku ostaju poslovi koji zahtevaju više inteligencije, znanja i
kreativnosti. Tako, robotski sistemi doprinose istovremeno povećanju
produktivnosti i huminizaciji rada.
mena.
Slične primere nalazimo i ranije kroz istoriju. Razvoj tehnike i sredstava
za proizvodnju nije bio ravnomeran. Smenjivali su se periodi ubrzanog razvoja i
relativne stagnacije. Najpoznatiji skok u razvoju, poznat pod imenom
industrijska revolucija, nastupio je krajem osamnaestog i početkom
devetnaestog veka. Počelo je 1733. godine sa pojavom mehanizovanog
razboja za tkanje. Sledeći veliki pronalazak bila je parna mašina
(1769), a zatim je nastupio buran razvoj tehnike i sredstava za proizvodnju,
odakle je i potekao naziv industrijska revolucija. Istorijski gledano, postoji
još niz pronalazaka i naučnih dostignuća koji su bitno
obeležili tehnički razvoj sveta u određenim periodima.
Spomenućemo otkriće i kasnije korišćenje atomske energije,
kao i otkriće tranzistora koji je omogućio nagli razvoj elektronike.
Svedoci smo ubrzanog razvoja nauke i tehnike. Razvoj nauke i novih tehnologija,
po mišljenjima mnogih, nagoveštavaju kvalitativne promene u oblasti
proizvodnje i društvu uopšte. Brzi razvoj računarskih i
komunikacionih sistema omogućava izrazito povećanje protoka
informacija, a visoka automatizacija u industriji sve više stavlja
čoveka u položaj samo nadgledanja proizvodnje. Shvativši
značaj i perspektive ovih procesa, razvijene zemlje odvajaju sve veća
sredstva za naučnoistraživački rad i razvoj visokih tehnologija.
Naravno, velika ulaganja značajno ubrzavaju procese razvoja. Izgleda da je
opravdano govoriti o novoj tehnološkoj revoluciji i prelasku razvijenih
zemalja u novu eru post-industrijskog društva. Jedan od bitnih
činilaca nove revolucije je fleksibilna automatizacija čiji
ne-razdvojni deo predstavljaju robotski sistemi. Ideja o robotima nastala je
prvo u naučnoj fantastici. I danas, u diskusijama o robotskim sistemima i
svemu što oni donose teško možemo izbeći vizije iz oblasti
naučne fantastike. Naravno, na robote danas gledamo mnogo
praktičnije, jer nam stupanj razvoja tehnike to omogućava. To su
veoma složeni uređaji koji su se mogli pojaviti kada su se razvile
one grane nauke na kojima se današnja robotika zasniva: teorija
mašina, teorija automatskog upravljanja, računarska tehnika, metode
tzv. veštačke inteligencije, kao i tehnologija senzora i
pretvarača. Na robote danas gledamo kao na uređaje koji
omogućavaju dalju i fleksibilniju automatizaciju. Oni zamenjuju
čoveka prvenstveno na opasnim, monotonim i teškim poslovima.
Čoveku ostaju poslovi koji zahtevaju više inteligencije, znanja i
kreativnosti. Tako, robotski sistemi doprinose istovremeno povećanju
produktivnosti i huminizaciji rada.
1.1. ZAŠTO ROBOTI?
U ovom odeljku ukazaćemo na
neke od oblasti tehnike i proizvodnje čiji je razvoj bitno uticao na
pojavu i usavršavanje robota u tom smislu da su te oblasti tehnike prosto
zahtevale uređaje robotskog tipa.
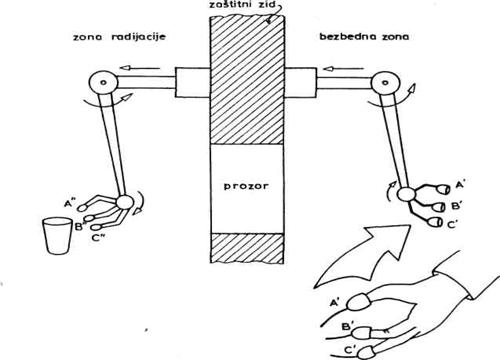
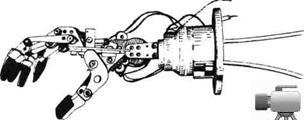
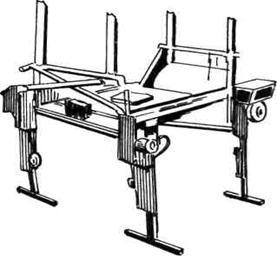
Sl. 1.1. Kopirajući
manipulator
Jedna od takvih oblasti je
nuklearna tehnologija. Tu se radi sa radioaktivnim materijama i u zonama
izloženim radijaciji, na primer kod montaže i demontaže
elemenata nuklearnog reaktora ili intervencije u slučajevima havarija na
nuklearnim postrijenjima. Radi rešenja ovih problema razvijeni su prvo
kopirajući manipulatori (sl. 1.1.). Oni su omogućavali da
čovek-operator, stojeći u bezbednoj zoni, iza zaštitnog zida,
rukuje radioaktivnim materijama. On svojim rukama vodi takozvani
upravljajući mehanizam manipulatora. Izvršni mehanizam koji se nalazi
u opasnoj zoni kopira to kretanje i tako obavlja željenu radnju.
Za različite složene
operacije na nuklearnim postrojenjima kasnije su razvijeni pokretni
manipulatori (na točkovima ili gusenicama) kojima se iz daljine upravljalo
na osnovu televizijske slike snimljene kamerom postavljenom na vozilu (sl.
1.2). Sličan problem rada u negostoljubivim sredinama javlja se pri
ispitivanju podvodnog sveta na većim dubinama, kao i pri svemirskim
istraživanjima. Za ispitivanja u dubinama okeana konstruišu se
specijalna plovila, sa ili bez posade, opremljena manipulatorima.
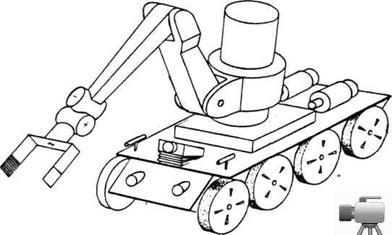
Sl. 1.2. Mobilni (pokretni)
manipulator
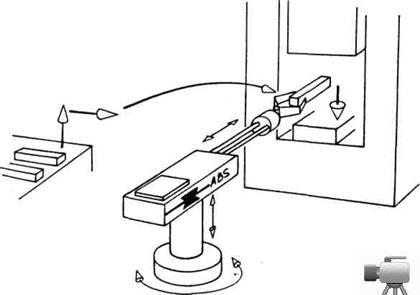
Sl. 1.3. Manipulator
opslužuje presu
Pri kosmičkim istraživanjima već danas se koriste robotski sistemi. Tako je američki raketoplan Šatl opremljen manipulatorom za postavljanje ili hvatanje satelita (sl. 1.7.), a još šira primena manipulacionih robota očekuje se kada počne montaža većih orbitalnih stanica.
Robotski uređaji se već
koriste pri istraživanju drugih planeta. Sovjetska sonda Luna-17 1970.
godine iskrcala je na Mesec automatsko vozilo Lunohod-1 koje je obavilo niz
zadataka krećući se po površini Meseca. Američka sonda
Viking, koja se meko spustila na Mars, bila je opremljena manipulatorom koji je
uzeo uzorke Marsovog tla i stavio ih u uređaj za hemijsku analizu. Za
razliku od ranije spominjanih manipulatorskih uređaja kojima je
neposredno upravljao čovek-operator, ovakvi uređaji koji se
upućuju na druge planete moraju imati veliku samostalnost u radu zbog
složenog problema komunikacije na velikoj udaljenosti.Posebnu važnost
u nastajanju i usavršavanju robota ima mogućnost njihove industrijske
primene. Stalna težnja za povećanjem produktivnosti industrijske
proizvodnje vodila je sve većoj automatizaciji. Čovek je prvo
zamenjen na jednostavnim poslovima koje je mogao obaviti prost industrijski
manipulator-automat. To je bilo uglavnom premeštanje materijala i
obrađenih delova, a kasnije i opsluživanje mašina. Na slici 1.3
prikazan je manipulator koji opslužuje presu. Takav posao je opasan.
Može doći do povređivanja radnika što je još jedan
razlog da čovek bude zamenjen na takvim poslovima. Napretkom nauke i
tehnike usavršavali su se i manipulatori i mogli su obavljati sve
složenije poslove. Današnji veoma složeni manipulatori koje
nazivamo robotima obavljaju niz poslova u industriji i već su
izgrađene prve potpuno robotizovane fabrike. Negde se one nazivaju
fabrikama bez ljudi, međutim, čovek je tu prisutan kao kontrolor ali
više ne pojedinačnih mašina, već kompletnog procesa
proizvodnje. Posebnu pogodnost robotskih sistema u industriji predstavlja
njihova prilagodljivost-fleksibilnost. Radi se o mogućnosti jednostavnog
prelaska sa jednog posla na drugi, a time i lakog prilagođavanja promenama
u proizvodnji. Time su roboti znatno uticali na formiranje takozvanih
fleksibilnih proizvodnih sistema-proizvodnje koja omogućava brzu promenu
asortimana i ekonomičan rad u malim serijama. Robotski sistemi primenjuju
se i u medicini. Medicinska robotika je oblast koja se odlikuje nizom
specifičnosti. Glavna karakteristika medicinskih robota, koja umnogome
određuje celokupan razvoj, je da su ovo jedini robotski uređaji koje
čovek nosi na sebi. Oni ne zamenjuju čoveka na zadatim poslovima,
već zamenjuju ili pokreću delove čovekovog tela u svakodnevnom
životu. Ovi uređaji dele se u dve glavne grupe: proteze i ortoze.
Proteze su uređaji koji zamenjuju nedostajuće organe ili delove tela.
Ortoza, pak, ima zadatak da pokrene deo tela koji postoji ali zbog bolesti ili
povrede ne može sam da se pokreće. Proteza mora biti takve
konstrukcije da odgovara obliku dela tela koji zamenjuje. Od nekadašnjih
drvenih nogu i kuke koja je zamenjivala nedostajuću šaku došlo
se do nožnih proteza koje pokreću motori i do veštačkih
šaka koje omogućavaju složene pokrete. Na slici 1.4. prikazana
je proteza ruke i veštačka šaka. Dakle, proteza ruke
predstavlja, u stvari, specifičan manipulator. Specifičnost se ogleda
u obliku konstrukcije i načinu upravljanja.
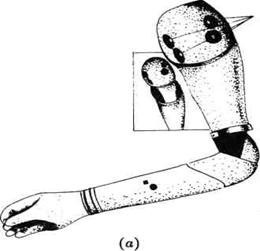
Sl. 1.4. Proteza ruke i proteza
šake
Savremene ortoze su uređaji
koji bolesniku sa nepokretnim pojedinim delovima tela omogućavaju kretanje
i olakšavaju život. Snabdevene su motorima sa posebnim načinom
upravljanja. Moglo bi se reći da ortoza predstavlja spoljašnji skelet
za nepokretni deo tela. Jedna takva ortoza za pokretanje ruke prikazana je na
sl. 1.5. Treba još reći da se u poslednje vreme sa koncepcije
spoljašnjeg skeleta, kada god je to moguće, prelazi na modularni
koncept. Prave se ortoze za pojedine delove tela ali samo onoliko koliko je
neophodno, a pri tome se nastoji da se što više iskoriste
postojeće motorne funkcije pacijenta. Sa ovim su tesno povezane i metode
takozvane elektrostimulacije mišića, međutim, to već izlazi
iz domena robotike.I sa stanovišta upravljanja medicinski roboti se
odlikuju nizom specifičnosti. Za razliku od industrijskih robota koji
obavljaju periodično ponavljanje određenih radnji, medicinski roboti
treba da se kreću u zavisnosti od čovekove volje. Stoga se
istražuje niz ideja kako da korisnik uređaja nekim voljnim radnjama
pokrene protezu ili ortozu.
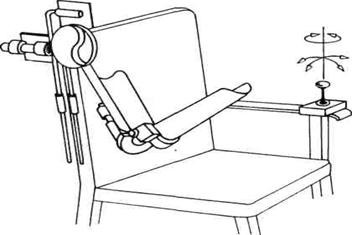
Sl. 1.5. Ortoza ruke
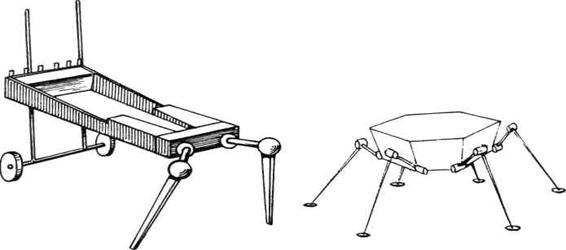
Sl. 1.6. Prototip šetonožnog
transportnog vozila
Reći ćemo nešto o
primeni robotskih sistema u transportu. Problem se javlja kod transporta po
veoma nepravilnom terenu. Po takvom terenu ne mogu se kretati terenska vozila,
a uočljiva je lakoća kojom ih čovek ili životinja savlađuju.
Otuda se nametnula ideja o konstruisanju transportnog vozila koje bi umesto
točkova imalo noge. Ova potreba uklapala se u Pocetna
istraživanja na polju robotike. Naime, prva naučna istraživanja
u robotici počela su kao pokušaji realizacije veštačkog
hoda. Eksperimentisalo se sa četvoronožnim, šestonožnim i
osmonožnim mašinama. Bilo je nekoliko pokušaja da se ovakve
eksperimentalne mašine prilagode praktičnoj primeni. Međutim, u
tome se do danas nije uspelo, mada treba reći da je u toku rad na nekoliko
projekata koji tek treba da pokažu rezultate. Jedan od projekata koji
imaju šansu da se potvrde prikazan je na slici 1.6. U pitanju je
američki prototip šestonožnog transportnog vozila. Potrebe za
robotskim sistemima znatno su veće nego što smo ovde mogli prikazati,
jer se radi o veoma savremenoj vrsti automatizacije koja pruža velike
mogućnosti. Ovde je bio cilj da se ukaže na osnovna polja primene
robota i na one praktične probleme koji su podstakli razvoj robotike.
1.2. ROBOTI I NAUČNA
FANTASTIKA
U bilo kojoj diskusiji o robotima
nezaobilazna tema je naučna fantastika. Za to postoji dovoljno jak razlog.
Gledano kroz istoriju, dobri pisci naučno-fantastične literature
veoma su uspešno predviđali razvoj nauke i tehnike u mnogim
oblastima. Tako je bilo i sa robotikom. Roboti se prvi put pominju oko 1920.
godine u naučno-fantastičnoj drami češkog pisca Karela
Čapeka pod nazivom "R.U.R." (Rosumovi univerzalni roboti);
dakle, četrdesetak i više godina pre nego što su se pojavili
prvi stvarni robotski uređaji. Čapek piše o mehaničkim
ljudima - robotima koji su obdareni visokim intelektom i izuzetnim
fizičkim sposobnostima. Njegova vizija je sumorna jer se roboti,
konstruisani da zamene žive ljude u fabrikama, oslobađaju
čovekove kontrole i počinju da uništavaju svoga tvorca. Tako je
počelo, a kasnije su slične teme obrađivali nebrojeno puta mnogi
pisci naučne fantastike. U diskusiji o naučnoj fantastici trebalo bi
spomenuti i poznatu seriju filmova "Ratovi zvezda" i robote R2D2 i
C3PO koji se u njima pojavljuju (sl. 1.7a1). Pisci naučne fantastike
gledaju na robote različito. Neki ih vide kao uređaje koji će
pomoći čoveku, osloboditi ga svih teških i nezanimljivih poslova
i time mu život učiniti lakšim i kreativnijim. Drugi pisci, pak,
u tome vide opasnost i mogućnost da čovek, oslobođen niza
poslova, krene putem negativne evolucije i degeneracije. Nakon ovog izleta u
naučnu fantastiku vratimo se realnosti i na početku pogledajmo
šta o zamisli naučne fantastike ima mogućnosti da se ostvari u
skorijoj budućnosti. Uporedićemo neke od poznatih zamisli sa
pojedinim stvarnim projektima. Od ovih stvarnih projekata neki su
doživeli praktičnu primenu, a neki ostali kao eksperimentalni
uređaji. Upoređenje je prikazano na slici 1.7, a čitaocu se
ostavlja da zaključi šta je tu fantastika, a šta realnost.
Napravili smo poredjenje samo na osnovu nekoliko primera, međutim, i
ozbiljniji pregled bi pokazao da mnogi uređaji koji se danas smatraju
naučnom fantastikom već sutra mogu postati realnost.
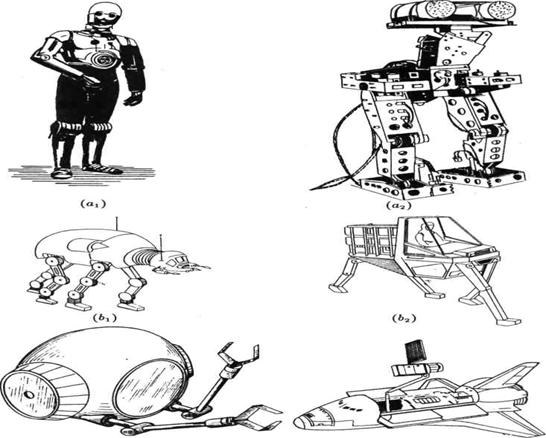
Sl. 1.7. Naučna fantastika i
realnost
Videli smo da je već prva pojava robota u literaturi, još u vreme kada su se mogli samo zamisliti, bila propraćena strahom čoveka od takvih uređaja. To i jeste prirodnih nastavak čovekovog straha od mašine. Istorijski gledano strah od mašine nije bio iracionalan. Nakon industrijske revolucije, mašine koje su ubrzavale i u nekoliko automatizovale proizvodnju učinile su da je isti posao mogao da se obavi sa manjim brojem radnika. To je smanjivalo potrebu za radnom snagom te se pojavio sasvim realan strah radnika da će izgubiti posao. Stoga su polovinom devetnaestog veka revoltirani radnici uništavali mašine. Bio je to pogrešan put za rešenje konflikta između čoveka i mašine kao i za rešenje problema otpuštanja radnika. Sličan strah izaziva pojava robota i njihova prva primena, što može posebno doći do izražaja u vremenima krize i povećane nezaposlenosti. Pretpostavljamo da savremeni čovek može brzo prihvatiti robote kao način povećanja automatizacije proizvodnje, od čega, u krajnjem slučaju, može imati koristi. Uporedo sa povećanjem automatizacije u proizvodnji, a pogotovo sa pojavom savremenih računara i robota, stalno su vođene diskusije o mogućoj dehumanizaciji rada koju takvi uređaji donose. Filozofi, sociolozi i inženjeri vodili su rasprave o odnosu čoveka i mašine u savremenom društvu i o promenama u društvu koje moderna tehnologija uslovljava. Čiju se i upozorenja i preporuke da se od mnogih modernih tehnologija kao što su roboti (ili npr. genetski inžinjering itd.) odustane. Jedno je, međutim, sigurno, roboti će se ubuduće proizvoditi i primenjivati sve više i biće sve savršeniji. Slično je i sa ostalim modernim tehnologijama, a na društvu je zadatak da pronađe načine da se prilagodi ovoj realnosti i savlada sve protivrečnosti koje takva realnost donosi. Tehnički i naučni progres mora biti u funkciji ljudskog blagostanja.
U ovom odeljku spominjali smo
više puta pojam veštačke inteligencije. O tome će biti
više reči u glavi 9. ove knjige, a za sada recimo da pod tim pojmom
podrazumevamo sposobnost robota da rešava neke nepredviđene situacije
(na primer, prepreku na putu), da prikuplja informacije o spoljašnjem
prostoru (na primer, analizom slike dobijene televizijskom kamerom) i da na
osnovu toga donosi odluke o načinu izvršenja postavljenog zadatka. Tu
još spada i mogućnost raščlanjivanja problema na prostije
celine, mogućnost učenja i formiranja iskustva i sl. Ovakva
definicija je, ipak, nedovoljno precizna. Nerešeno je i pitanje krajnjih
mogućnosti robotskih sistema. Mnogi ozbiljni autori bavili su se ovim
pitanjem. Smatra se da će roboti u bližoj ili daljoj budućnosti
moći da izvršavaju niz složenih poslova kao npr.:
opsluživanje svih vrsta mašina, sastavljanje složenih sklopova i
uređaja (automobilski motor, televizor, frižider itd.), obavljanje
kućnih poslova (postavljanje i raspremanje stola, stavljanje i
vađenje posuda iz mašine za pranje, nameštanje
kreveta),vožnja traktora, branje voća, itd. Očigledno je da su u
pitanju složeni poslovi koji zahtevaju priličnu prilagodljivost, ali
ipak stepen nepredvidljivosti nije velik. S druge strane smatra se da će
svi poslovi koji sadrže visok stepen nepredvidljivost ili, pak, zahtevaju
kreativnost i osećajnost, ostati i u daljoj budućnosti iznad
mogućnosti robotskih uređaja. Uzmimo nekoliko primera: vožnja
automobila u veoma gustom gradskom saobraćaju, hirurške operacije,
igranje fudbala ili košarke na vrhunskom nivou, umetničko
šišanje kose i pravljenje frizure, sviranje violine itd. Dakle,
krajnje mogućnosti budućih robota su znatno ispod mogućnosti
čoveka. Ipak, te granice se stalno pomeraju i teško ih je danas
precizno predvideti.
1.3. POJAM I NAZIV ROBOTA
U određivanju pojma robota
možemo krenuti od jedne popularnije definicije koju nalazimo u
Vebsterovom (Webster) rečniku. Prema toj definiciji robot je
"automatizovani uređaj koji obavlja funkcije koje se obično
pripisuju čoveku". Zvanična definicija data od strane RIA
(Robotic Industries Association) je, međutim, znatno preciznija ali se
odnosi samo na industrijske robote. Ona, u slobodnijem prevodu ![]() glasi:
"Industrijski robot je višefunkcionalni manipulator koji se može
reprogramirati i koji je namenjen da pomera radni materijal, predmete, alat i
specijalne uređaje na razne zadate načine u cilju izvršavanja
različitih zadataka". Vratimo se sada prvoj definiciji robota. U
pominjanoj drami Karela Čapeka robotima se nazivaju mehanički ljudi
koji rade u fabrikama. Tu je uveden i naziv robot. Naziv je izveden iz
češke reči "robota" koja označava prisilni rad.
Taj naziv je kasnije preuzet i u svim drugim svetskim jezicima. Obratimo sada
pažnju na karakteristike robota. Čapek navodi da su roboti
mehanički savršeni i poseduju izuzetno veliku inteligenciju. To je
uobičajena vizija autora naučne fantastike. Tako, u nastanku pojma
robota "mehanička savršenost" i "velika
inteligencija" postaju njegove glavne odrednice. Razvojem nauke, posebno
automatizacije, termin robot, uz izmenjen sadržaj, ulozi u svakodnevnu
upotrebu. Tridesetih godina ovog veka dolazi do značajne modernizacije
proizvodnje. Formiraju se moderne proizvodne linije na kojima se nalaze i
različiti automati. Danas takvi automati i poslovi koje su radili deluju
veoma jednostavno, međutim, u ono vreme oni su bili proizvod vrhunske
tehnike i nazivani su robotima.
glasi:
"Industrijski robot je višefunkcionalni manipulator koji se može
reprogramirati i koji je namenjen da pomera radni materijal, predmete, alat i
specijalne uređaje na razne zadate načine u cilju izvršavanja
različitih zadataka". Vratimo se sada prvoj definiciji robota. U
pominjanoj drami Karela Čapeka robotima se nazivaju mehanički ljudi
koji rade u fabrikama. Tu je uveden i naziv robot. Naziv je izveden iz
češke reči "robota" koja označava prisilni rad.
Taj naziv je kasnije preuzet i u svim drugim svetskim jezicima. Obratimo sada
pažnju na karakteristike robota. Čapek navodi da su roboti
mehanički savršeni i poseduju izuzetno veliku inteligenciju. To je
uobičajena vizija autora naučne fantastike. Tako, u nastanku pojma
robota "mehanička savršenost" i "velika
inteligencija" postaju njegove glavne odrednice. Razvojem nauke, posebno
automatizacije, termin robot, uz izmenjen sadržaj, ulozi u svakodnevnu
upotrebu. Tridesetih godina ovog veka dolazi do značajne modernizacije
proizvodnje. Formiraju se moderne proizvodne linije na kojima se nalaze i
različiti automati. Danas takvi automati i poslovi koje su radili deluju
veoma jednostavno, međutim, u ono vreme oni su bili proizvod vrhunske
tehnike i nazivani su robotima.
Originalna definicija je: "An industrial robot is a reprogrammable, multifuncional manipulator designed to move material, parts, tools, or special devices through variable programmed motions for the performance of a variety of tasks".
Robotom je smatran svaki
tehnički uređaj sposoban da obavi neke radnje i poslove koje je
ranije radio čovek. Nije bilo potrebno da takav uređaj liči na
čoveka niti da se odlikuje nekom širom mogućnošću
kretanja ili pak mogućnošću prilagođavanja različitim
zadacima. Automati su vremenom usavršavani, no njihove bitne
karakteristike u pogledu mogućnosti kretanja i prilagođavanja nisu se
menjale. Kvalitativni skok nastupa pedesetih godina. Razvija se tehnika
računara i pojavljuju se mašine i uređaji kojima su upravljali
elektronski računari. To su takozvane numerički upravljane mašine.
One su mogle da obave veoma složene poslove ali su to ipak bile samo
strogo određene kretnje za koje je mašina konstruisana (na primer,
automatizovani strug). Takve mašine nazivane su tada robotima. Presudna
je bila sposobnost računara da obavlja, slično čoveku,
određene intelektualne radnje.
Približno u isto vreme sa
numerički upravljanim mašinama, razvijaju se i kopirajući
manipulatori koji su neophodni za rad sa radioaktivnim materijama. Iz
današnje perspektive možemo reći da su savremeni roboti nastali
sjedinjavanjem manipulatora i numerički upravljanih mašina. Od
manipulatora je preuzeta više ili manje čovekolika ruka koja se
odlikuje velikom mogućnošću različitih i složenih
kretanja. Od numerički upravljanih mašina preuzet je digitalni
računar koji je sada upravljao manipulatorom i posedovao mogućnost
jednostavne promene programa. Tako je postignuta i sposobnost
prilagođavanja robota različitim zadacima. Konačno, razvojem
računara i metoda veštačke inteligencije robotu je
omogućeno snalaženja i u nekim nepredviđenim situacijama. Zaključujemo
da se u određivanju pojma robota moramo ponovo vraćati izvornoj
definiciji Karela Čapeka. Njegovu definiciju ćemo iz fantastike
prevesti u realnost. Umesto "mašine koja je mehanički
savršenija od čoveka" i "koja ima izuzetnu
inteligenciju", govorićemo o tehničkom uređaju koji je
namenjen da izvršava neka kretanja i funkcije koje obavlja čovek i
koji se odlikuje određenom samostalnošću, odnosno
autonomnošću u radu. Primetićemo da je ova definicija nedovoljno
precizna u nekim svojim delovima. Govorimo o "nekim kretanjima i funkcijama"
i o "određenoj samostalnosti". Ova nedovoljna preciznost nije
slučajna. Njome smo postigli da definicija važi i za prošlost i
za sadašnjost, a i za budućnost. U definiciji se precizno navode samo
glavne odrednice pojma robota: sposobnost obavljanja nekih kretanja svojstvenih
čoveku i samostalnost u radu tj. neka vrsta intelekta. Međutim, ne
precizira se u kom obimu su ove osobine izražene. Radi se o tome da se
nekada nije zahtevala velika složenost kretanja koje se može
ostvariti, a samostalnost je podrazumevala jedino sposobnost da se zadate
radnje automatski ponavljaju. Danas od robota zahtevamo mnogo više. Robot
mora ostvariti veoma složena kretanja, a i pojam samostalnosti se izmenio.
Robot mora biti sposoban ne samo za automatizovano izvršavanje
postavljenog zadatka već i za snalaženja u nekim situacijama koje su
izvan normalnog radnog režima; on mora reagovati i prilagođavati se
različitim poremećajima uslova rada. Takvu sposobnost već
možemo nazvati inteligencijom. Sadašnja istraživanja u oblasti
robotike pokazuju da će roboti biti mehanički sve savršeniji, a
njihovi upravljački sistemi posedovaće sve više
veštačkih čula i elemenata veštačke inteligencije. Kao
primer neka posluži čulo vida u obliku televizijske kamere sa
računarskim algoritmima za prepoznavanje oblika. Zatim, tu su merači
sile pritiska, laserski daljinari i razni drugi uređaji. Time će
roboti postati zaista veoma samostalni u radu.
1.4. PROBLEMI
VEŠTAČKOG HODA
Problemima veštačkog hoda, odnosno hodajućim mašinama i vozilima u ovoj knjizi nećemo posvetiti mnogo pažnje mada je to važan deo robotike. Knjiga prvenstveno obrađuje industrijsku robotiku pa će stoga biti samo ukazano na glavna pitanja realizacije veštačkog hoda. Treba naglasiti da, prateći odrednice pojma robota uvedene u odeljku 1.3, ovaj pojam obuhvata i hodajuće mašine jer one vrše složena kretanja, a upravljački sistem im može obezbediti određenu samostalnost u pogledu načina hoda i savlađivanja prepreka.
Sva vozila koja su danas u
praktičnoj upotrebi zasnivaju se na korišćenju točka.
Točak je izmišljen pre približno šest hiljada godina i od
tada do sada pokazao se kao nezamenljiv. Nećemo objašnjavati
značaj točka u svim vrstama mehanizama već se ograničiti
na točak kao osnovni element svakog transportnog sredstva namenjenog za
kretanje po tvrdoj podlozi. Vozila sa točkovima omogućavaju da se
brzo kreće po podlozi koja nema mnogo neravnina i prepreka. Za kretanje po
neravnom terenu često se projektuju vozila sa većim brojem
točkova ili sa gusenicama koje predstavljaju jednu posebnu varijantu
upotrebe točkova. Gusenice su, na primer, omogućile znatno manji
pritisak vozila na podlogu i efikasnije savlađivanje prepreka na terenu.
Ako je teren izuzetno nepravilan i sa mnoštvom prepreka, po njemu se ne
može kretati ni gusenično vozilo. Nasuprot tome, čovek ili
životinja po tom terenu kretaće se bez većih problema. Tako se
nameće ideja o konstruisanju terenskog vozila koje bi se kretalo nogama,
dakle, hodajućeg vozila. Ideja za pravljenje hodajućeg vozila nije
potekla samo iz opisane praktične potrebe, ona je došla i zbog stalne
težnje čoveka da napravi svoju kopiju. Razmotrimo osobine jednog
hodajućeg vozila. Osnovni kvalitet je mogućnost kretanja po
složenom terenu. Ostale osobine izgleda da pokazuju prednost točkova:
hodajuće vozilo ne može se kretati brzo; mehanička konstrukcija
nogu i njihovog pogona vrlo je složena; a upravljački sistem koji bi
obezbedio koordinisano kretanje nogu pri savlađivanju složenog terena
predstavlja najveći problem. Ipak, univerzalnost kretanja koju bi
hodajuće mašine ostvarile sigurno opravdava njihov razvoj i
usavršavanje. Razmotrimo sada neke konkretne probleme realizacije
veštačkog hoda kao što su problem stabilnosti, koordinacija rada
nogu i sl.
1.4.1. Dvonožne i višenožne
mašine
Kada govorimo o hodajućim
mašinama neizbežno se nameće pitanje broja nogu takve
mašine. Broj nogu nije pitanje formalne prirode. Taj broj određuje
način kretanja i održavanja ravnoteže. Sa tim su usko vezani i
problemi upravljanja koji će obezbediti koordinisani rad nogu u
ostvarivanju određenog tipa hoda i posebno stabilnosti kretanja. Do sada
se radilo na ispitivanju i konstrukciji dvonožnih,
četvoronožnih, šestonožnih i osmonožnih mašina.
Analizirajmo prvo probleme koji se javljaju pri realizaciji veštačkog
dvonožnog hoda. Takve dvonožne hodajuće mašine nazivamo
bipedi. Osnov za konstruisanje bipeda leži u imitiranju čovekovog
hoda. Međutim, posmatranja su pokazala bitne razlike u hodu kod
različitih ljudi kao i kod jednog istog čoveka kada hoda brže
ili sporije. Ipak, neke zajedničke osobine postoje. Pri veoma laganom i
pri normalnom hodu postoje dve faze u okviru svakog koraka: jednooslonačka
i dvooslonačka. U jednooslonačkoj fazi je samo jedna noga na podlozi,
a druga noga se kreće napred. Dvooslonačka faza nastupa kada se i
druga noga spusti na podlogu. Hod se ostvaruje naizmeničnim smenjivanjem
ovih faza. Analizirajmo sada pitanje stabilnosti. Obično se kaže da
čovek "prebacuje težinu sa jedne noge na drugu". To se
može shvatiti na sledeći način. Možemo zahtevati da u
jednooslonačkoj fazi težište tela bude iznad površine
stopala a u dvooslonačkoj fazi da bude iznad površine koja se nalazi
između stopala (sl. 1.8). Na ovaj način ostvaruje se statička
stabilnost u svakom trenutku hoda. Dakle, u svakom položaju pri hodu
čoveka bismo mogli zaustaviti, a da on ne padne.
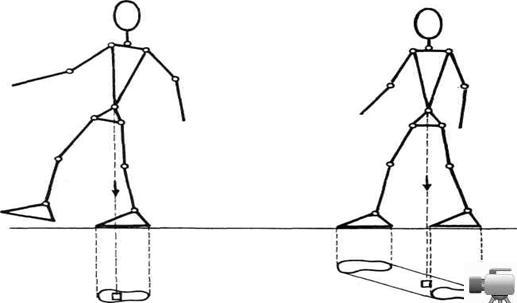
Sl. 1.8. Jednooslonačka i
dvooslonačka faza hoda
Većina do sada realizovanih
uređaja za dvonožni hod koristi upravo ovaj princip. Međutim,
čovek hoda na takav način samo pri veoma sporom kretanju. Pri
normalnom hodu položaji tela su takvi da čovek ne bi imao
ravnotežu ako bismo ga u tom položaju zaustavili. Srušio bi se.
U hodu se, međutim, neće srušiti. Često se kaže da se
tada pri hodu postiže takozvana dinamička stabilnost, dakle uz
učešće inercijalnih sila. Ovakvo kretanje, u slučaju hodajuće
mašine, može se realizovati na sledeći način. Zadajemo
nogama mašine željeno kretanje, a zatim proračunavamo kretanje
gornjeg dela tela tako da se ostvari stabilnost. Postoji i drugačiji pristup.
Nestabilno kretanje u jednooslonačkoj fazi stabilizuje se sudarnim efektom
pri spuštanju druge noge na podlogu. Jedna praktična realizacija
bipeda predstavljena je na slici 1.7a2. Druga praktična realizacija je
takozvani spoljašnji skelet - ortoza za paraplegičare prikazana na
slici 1.11. Spomenimo još problem vrlo brzog hoda - trka. Osobenost takvog
hoda je da ne postoji dvooslonačka faza. Jednooslonačke faze
razdvojene su intervalima u kojima nijedna noga nije na podlozi. Razmotrimo
sada problem četvoronožnog hoda. I u tom slučaju pokazuje se
nekoliko načina hoda: lagan hod, kas i trk. Za realizaciju je, sa
stanovišta ostvarivanja stabilnosti, najjednostavniji lagan hod. Pri
laganom hodu pomera se jedna po jedna noga. Na taj način tri noge su uvek
na zemlji i može se postići statička ravnoteža.
Težište treba da se nade uvek iznad površine određene sa
tri noge koje su trenutno na zemlji. U slučaju bržeg kretanja
četvoronožne mašine moramo odustati od statičke
ravnoteže i primeniti slično razmišljanje kao kod bipeda.
Šestonožne i osmonožne mašine ostvaruju stabilnost znatno
jednostavnije. Uslov statičke ravnoteže može se obezbediti i pri
većim brzinama kretanja. Pri hodu se ne mora premeštati napred jedna
po jedna noga. U vazduhu se mogu istovremeno naći dve noge, sa svake
strane tela po jedna, ili čak tri noge, dve sa jedne i jedna sa druge
strane.
a)
b)
c)
d)
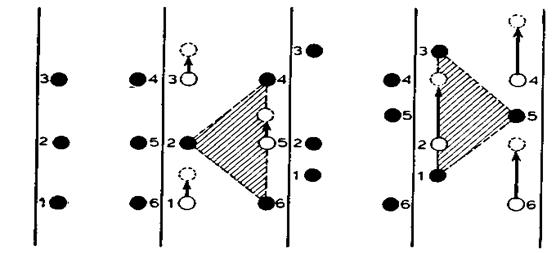
Sl. 1.9. Shema
šestonožnog hoda
Razmotrićemo detaljnije hod šestonožne mašine sa pomeranjem tri noge odjednom. Posmatrajmo sliku 1.9. Noge mašine označene su brojevima od 1 do 6. Crni krugovi predstavljaju noge koje su na zemlji, a prazni krugovi noge koje su podignute. Na slici (a) svih šest nogu su na zemlji. Sada počinje kretanje. Podižu se tri noge (1,3 i 5 na slici b) i pomeraju napred. Mašina pri tome zadržava stabilan oslonac na preostale tri noge. U pitanju je statička ravnoteža jer u svakom položaju mašina može i da se zaustavi, a da ne padne. Trougaona zona oslonca prikazana je na slici. Nakon pomeranja napred, tri podignute noge se spuštaju (slika c). Sada se podižu druge tri noge (2, 4 i 6) i pomeraju napred, a oslonac je na nogama 1, 3 i 5 (slika d). Koncept višenožnih mašina pruža velike mogućnosti u smislu kretanja po neravnom terenu i savlađivanja različitih prepreka.
1.4.2. Upravljanje i koordinacija rada nogu
Pri realizaciji hoda neophodno je
obezbediti koordinisano kretanje nogu s ciljem ostvarivanja željenog
načina hoda, a zatim posebno izbegavanje prepreka. Jedan od prvih pristupa
koji je želeo da zadovolji ove zahteve primenjen je kod američkog
projekta četvoronožnog terenskog vozila (sl. 1. 7b2), a ideja je preuzeta
od kapirajućih manipulatora.
Svaka od četiri noge ovog vozila imala je kuk sa dva stepena slobode (obrtanje oko dve ose) i koleno sa jednim stepenom slobode. Dakle, u kuku je noga mogla da se obrće napred-nazad i mogla je da se izbaci ustranu. U kolenu je postojalo jedno obrtanje. Svako od ovih kretanja bilo je osnaženo posebnim hidrauličnim pogonom. Trebalo je upravljati sa dvanaest kretanja, odnosno dvanaest hidrauličnih servo-pogona. Ideja za upravljanje vozilom bila je jednostavna. U kabini vozila, oko vozača, nalaze se mehanizmi koji predstavljaju umanjenu kopiju nogu vozila. Čovek rukama vodi prednje dve noge tog upravljačkog mehanizma, a svojim nogama zadnje noge mehanizma. On u kabini pravi takve pokrete da se noge upravljačkog mehanizma kreću kao pri četvoronožnom hodu. To kretanje se kopira i prenosi na prave noge vozila. Na taj način vozač ostvaruje željeni način hoda vozila. Može staviti nogu na mesto koje izabere, izbeći prepreku, neravninu na podlozi i sl. Upravljački kanali su bili dvosmerni tako da vozač oseti silu otpora kada noga dodirne podlogu. Takav sistem omogućava efikasnije vođenje mašine. Dakle, princip upravljanja ovim hodajućim vozilom isti je kao kod kopirajućih manipulatora. Opisana ideja za upravljanje bila je prilično primamljiva i jednostavna, no u praksi to nije bilo prosto. Vozilo nije ušlo u praktičnu primenu. Jedan automatski sistem vođenja nogu primenjen je kod dvonožne ortoze prikazane na slici 1.11. Snimanjem načina kretanja nogu zdravog čoveka došlo se do putanje koju treba ostvariti. Ta putanja zapamćena je u računaru. Električni servo-sistem orotze obezbeđivao je izvršavanje zapamćenog kretanja. Tako se dolazilo do željenog način hoda. Pacijent - korisnik ortoze je pokretanjem gornjeg dela tela održavao ravnotežu. Pri nailasku na prepreku (na primer, stepenice) neophodno je aktivirati program koji će obezbediti novi način hoda. Program je ranije pripremljen i zapamćen. Detekcija prepreke može biti ili od strane korisnika ili automatska, tj. pomoću senzora. Ovakav način upravljanja preko programiranog hoda koristi se i kod transportnih hodajućih mašina.
Jedan unekoliko različiti
pristup prikazaćemo na primeru medicinskog robota - nožne proteze ili
ortoze, mada se isti princip može primeniti kod šire klase hodajućih
mašina. Prethodni pristup zasnovan je na servo-sistemu koji ostvaruje
unapred zadato kretanje. To bi se moglo nazvati standardnim inženjerskim
pristupom. On uključuje merenje stanja uređaja ili, preciznije
rečeno, nalaženje brojnih vrednosti položaja i brzine. Drugi
pristup predviđa korišćenje informacija kvalitativnog tipa.
Senzori daju informacije na osnovu kojih se mogu formirati kategorije kao
što su: tvrda podloga, meka podloga, prepreka na putu i slično. U
memoriji računara nalaze se zapamćeni postupci ponašanja u
svakom od pomenutih slučajeva. Ovi postupci se formiraju u procesu
učenja kao neka vrsta iskustva. Kada uređaj u realnoj situaciji
prepozna neki od pomenutih slučajeva, aktivira se odgovarajući algoritam
iz memorije računara koji realizuje ponašanje. Pri tome nije
neophodno ostvariti strogo određene putanje već se stanje proteze
može posmatrati diskretizovano. Uočava se nekoliko bitnih stanja kao
što su: ispruženo koleno, skupljeno koleno i sl. Putanja između
ovih stanja ne smatra se posebno značajnom i može se formirati na
različite načine (na primer, optimizacijom). Zahtev za sve većom
autonomnošću robotskih sistema, pa i hodajućih mašina doveo
je do niza postupaka za detekciju prepreka i oblika podloge kao i
različitih pristupa upravljanju radom nogu.
1.5. RAZVOJ ROBOTSKIH SISTEMA
Često se kaže, kao što smo i mi već rekli, da su savremeni roboti nastali sjedinjavanjem kopirajućih manipulatora i numerički upravljanih mašina pri čemu su od manipulatora preuzeli manje ili više čovekoliku ruku, a od numerički upravljanih mašina sistem upravljanja pomoću računara. Ovo se očigledno odnosi na industrijske manipulacione robote koji su uvek opremljeni izvršnim mehanizmom u obliku ruke. Oni su se, dakle, razvijali kao produžetak i usavršavanje proizvodnih automata namenjenih za pomeranje delova u proizvodnji i opsluživanje mašina. Robotski sistemi razvijali su se nezavisno i sa stanovišta drugih upotreba. Posebno je značajan razvoj robotike u medicinske svrhe. Taj razvoj ima širi značaj od medicinske primene jer je rad na realizaciji nožnih ortoza i proteza doveo do teorijske analize veštačkog dvonožnog hoda, a kasnije i do razvoja opšte teorije robotike.
Važno mesto u razvoju
robotike predstavlja i rad na realizaciji hodajućih transportnih vozila.
Ta istraživanja bila su orijentisana ka višenožnom
veštačkom hodu. Danas se ove tri orijentacije u robotici ne mogu lako
razdvojiti. Manipulacioni roboti značajni su i za industrijsku i za
medicinsku primenu. U industriji rade na proizvodnim linijama, a u medicini
predstavljaju ortoze ili proteze ruke. Slično je i sa veštačkom
nogom koja nalazi primenu u medicini, a i kod hodajućih transportera.
Već iz ovih grubih poređenja vidimo stapanje ovih orijentacija,
međutim, one još uvek zadržavaju i neke svoje specifičnosti
o čemu je govoreno još na početku ove glave (odeljak 1.1).
1.5.1. Medicinska robotika i hodajuće
mašine
Sl. 1.10. Beogradska šaka
Sl. 1.11. Spoljašnji skelet za paraplegičare
Daćemo pregled nekih realizacija koje su, bez obzira na to da li su se na kraju pokazale uspešne ili ne, ostale zabeležene kao značajne u razvoju robotike. Prikaz nije hronološki, a ne mogu se sigurno ni prikazati sve realizacije koje to zaslužuju. Na slici 1.10. prikazana je takozvana beogradska šaka (R. Tomović i M. Rakić, Beograd). Šaka je bila sposobna da ostvari dva kretanja: stiskanje u pesnicu i skupljanje sa ispruženim prstima. Dakle, mogla je obaviti dve ključne radnje koje obavlja ljudska šaka. Na slici 1.11. prikazan je aktivni spoljašnji skelet (M. Vukobratović, Beograd). To je bila ortoza namenjena osobama sa oduzetim nogama. Spoljašnji skelet je pomoću motora ostvarivao zadato kretanje nogu, a korisnik je pokretanjem gornjeg dela tela održavao ravnotežu. Orotza je izrađena u varijanti hidrauličnog i u varijanti elektromotornog pogona.
I u Japanu je realizovana
dvonožna hodajuća mašina (I. Kato). Mašina (sl. 1.7a2) je
mogla da se kreće pravo, a i da se okreće u mestu. Sastojala se iz
nogu koje su se kretale po zadatom zakonu, a umesto gornjeg dela tela imala je
obrnuto klatno koje se prema potrebi naginjalo ulevo ili udesno u cilju održavanja
ravnoteže.Kretanje se zasnovalo na statičkoj ravnoteži pri
laganom hodu. Pogon mašine bio je hidraulični.
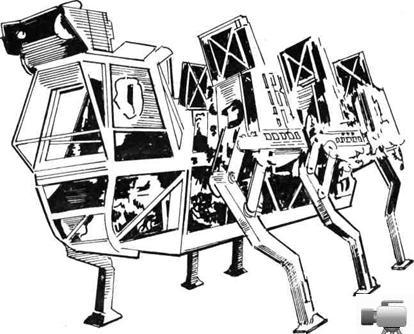
Slika 1.12. Kalifornijski konj
Slika 1.12. prikazuje četvoronožnu mašinu zvanu kalifornijski konj (R. To-mović, R. McGhee i A. Frank) realizovanu u SAD. Mašina pokretana elektromotornim pogonom mogla je da ostvari dve vrste kretanja; hod, kod koga su tri noge na zemlji čime se ostvaruje statička stabilnost, i kas. Mašina je realizovana na bazi konačnog automata.
U odeljku 1.4.2. opisano je
četvoronožno terensko vozilo (R. S. Mosher, R. A. Liston, General
Electric Company). Izgled vozila dat je na slici 1.7b2.
Uprošćeni model
hodajuće mašine (sl.1.13) sastavljen od dve noge i dva točka
konstruisan je radi ispitivanja mogućnosti kretanja preko prepreka
(E.Devijanin i A.V.Lenski). Mašina je uspešno automatski
savlađivala prepreke visoke oko 10% od dužine nogu.Na slici 1.14.
prikazana je šestonozna hodajuća mašina (M. Ignjatiev,
Lenjingrad) konstruisana za eksperimente hodanja po nepravilnom terenu. Pogon
mašine bio je hidraulični.
Sl. 1.13. Uprošćeni
model hodajuće mašine
Sl. 1.14.
Šestonožna mašina
Trebalo bi još spomenuti rad
grupe T. Okacimskog u Moskvi sa nizom modela šetonožnih mašina.
Na ovom mestu treba se osvrnuti i na razvoj teorije robotike. Mnogi projekti
ostvareni su bez oslanjanja na neku složenu teoriju. Nije postojala jedna
celovita teorija robotskih sistema tako da su se istraživači
oslanjali na postojeću teoriju automatskog upravljanja. I pored toga
realizacije su bile veoma uspešne.Sa stanovišta teorije ključni
rezultati su postignuti 1970-1973. kada su prvi put formulisani
matematički modeli manipulacionog mehanizma i dvonožne hodaj
uče mašine (J. Stepanjenko, Moskva i M. Vukobratović, Beograd).
Još izvesno vreme teorija i praksa robotike razvijale su se odvojeno da bi
se konačno srele. Svakom savremenom projektu u robotici prethodi temeljna
teorijska analiza koja uključuje dinamičku analizu, simulaciju i
računarsko projektovanje.
1.5.2. Industrijska robotika
Industrijski manipulacioni robot je uređaj opremljen mehaničkom rukom velikih mogućnosti kretanja i upravljačkim sistemom velike autonomije realizovanim na digitalnom računaru. Ovakav robot predstavlja današnju krajnju tačku razvojnog niza industrijskih automata. Industrijske robote delimo u tri generacije na osnovu toga u kojoj meri su izražene glavne odrednice robota: univerzalnost kretanja i autonomnost u radu. Pre nego što izložimo karakteristike robota prve generacije spomenimo industrijske automate koji izvršavaju zadata kretanja tako što se pokretanje i zaustavljanje obezbeđuje prekidačima ili mehaničkim graničnicima. Mada se po nekim definicijama i ovi uređaji svrstavaju u robote, danas je uglavnom prihvaćeno da takvi automatski manipulatori ipak nisu roboti jer je njihova univerzalnost i mogućnost reprogramiranja veoma ograničena. Roboti prve generacije u stanju su da automatski ponavljaju zadati pokret. Zapravo, ne radi se o samo jednom određenom pokretu, već o proizvoljnom pokretu koji se robotu zadaje preko, na primer, zapisa na magnetnoj traci. Novi zadatak podrazumeva novi program. Time se iscrpljuje mogućnost komunikacije sa robotom, a njegova samostalnost ogleda se u preciznom automatskom ponavljanju zadatog kretanja. Kod ovih robota srećemo dva načina pamćenja zadatog kretanja. Kod starijih tipova robot pamti određeni broj položaja pomoću odgovarajućeg broja grupa potenciometra koji se nalaze na upravljačkom pultu. Svaka grupa potenciometara pamti jedan položaj robota tako što jedan potenciometar iz grupe pamti vrednost pomeranja jednog pokretnog zgloba. U slučaju robota na slici 1.15. prvi potenciometar u grupi pamti ugao θ, drugi pamti visinu z, a treći pamti izduženje ruke ρ. U režimu automatskog rada robot će se kretati iz jednog položaja u drugi, a putanja između tih položaja ne može se kontrolisati. Kasnije je ovaj pristup modernizovan. Tačke u koje robot treba da dođe zadaju se pomoću magnetne trake. Tada je bilo moguće zadavati i putanju između pojedinih radnih tačaka u prostoru, a takođe i zadavati brzinu kretanja.
Roboti prve generacije nazivaju se
i engleskim terminom plejbek roboti (eng. playback). U slobodnom prevodu to bi
značilo ponavljajući roboti, zato što ponavljaju zadato
kretanje. U slučaju kretanja od tačke do tačke bez
mogućnosti upravljanja kretanjem između tačaka koristi se
engleski termin "point-to-point" upravljanje, a u slučaju
kontinualnog praćenja putanje engleski termin je "continuous path
control".
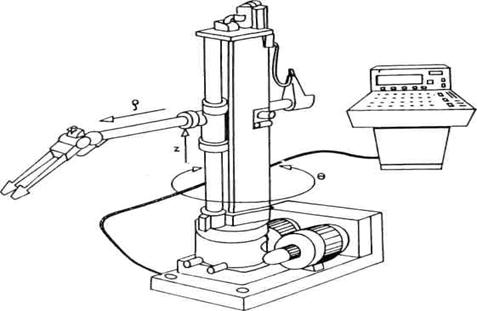
Sl. 1.15. Robot sa tri zgloba
Kao što vidimo, roboti prve generacije pružaju prilične mogućnosti za izvršenje različitih praktičnih zadataka. Međutim, bez obzira na njihov automatski rad, njihova samostalnost je, ipak, ograničena. Pokazaćemo to jednim primerom. Zamislićemo zadatak u kome bi robot uzimao predmete sa proizvodne trake i ostavljao ih na za to predviđena mesta. Robot će taj posao obavljati uspešno sve dok su predmeti koje uzima na tačno određenim mestima, mesta na koja se predmeti odlažu prazna, itd. Svaki poremećaj radnih uslova onemogućiće robotu da izvrši zadatak. Dovoljno je da predmet koji se hvata ne bude postavljen na predviđeno mesto sasvim precizno, ili da se u radnom prostoru pojavi prepreka. Da bi se robot mogao snalaziti u takvim nepredviđenim situacijama u radnom prostoru, on mora biti opremljen čulima. Pomoću njih će dobijati informacije i ispitivati uslove u radnom prostoru, a mora imati i programirane postupke ponašanja, odnosno snalaženja u pojedinim situacijama. Tako dolazimo do robota druge generacije. Reći ćemo nekoliko reći o čulima robota, odnosno davačima informacija ili senzorima. Davače informacija srećemo već kod robota prve generacije. To su uređaji koji mere i daju informacije o međusobnom položaju i brzini pokretnih delova ruke robota. Tako, robot je dobijao informacije o svom položaju i te davače nazivamo unutrašnjim. Roboti druge generacije moraju dobijati i informacije o prostoru i stvarima koje ih okružuju. Za to služe davači takozvanih spoljašnjih informacija. Navedimo nekoliko primera. Hvataljka robota izrađuje se obično u obliku klešta, odnosno šake sa dva prsta. Na unutrašnjoj strani hvataljke mogu se postaviti davači koji će registrovati dodir sa predmetom koji se hvata čime robot dobija informaciju da li je uhvatio predmet ili se hvataljka stisnula "u prazno". Složeniji davač izmerio bi i silu kojom hvatljka stiska predmet. Senzori dodira mogu se postaviti i na spoljašnje strane hvataljke da bi registrovali dodir sa eventualnom preprekom. Na prednjem delu hvataljke mogu se nalaziti i fotodiode koje će registrovati približavanje bilo kakvog predmeta ili prepreke. Posredstvom davača robot prima informacije iz radnog prostora i na osnovu njih donosi odluke o svom daljem ponašanju. Ovakav robot mora imati računar koji će primati informacije i donositi odluke. Očigledno, ovakvi sistemi omogućavaju robotu da reaguje u nekim slučajevima poremećaja uslova rada. Ako, na primer, nema predmeta koji treba uzeti sa proizvodne trake, robot će to registrovati, a zatim sačekati da dođe sledeći predmet. Ako naiđe na prepreku on će je "pipajući" zaobići. Za ove robote karakterističan je ovaj postupak "pipanja" odnosno rešavanje problema koji sadrže određenu dozu nepredvidljivosti metodom probe. Pokazaćemo na jednom primeru kao bi robot mogao ovim postupkom obaviti i neki složeniji posao. Neka to budu delovi koje treba pokupiti rasute po podlozi, a da pri tome ne znamo njihov tačan položaj. Robot bi krenuo u pretraživanje podloge tako Sto bi hvataljku pomerao levo-desno i polako napred. Kada naiđe na neki od delova, to će registrovati senzor dodira. Robot će uhvatiti taj deo i doneti ga do mesta predviđenog za njegovo odlaganje. Zatim će se robot vratiti u položaj gde je taj deo našao i nastaviti pretraživanje. Roboti druge generacije mogu obavljati veoma složene zadatke i, zahvaljujući elementima veštačke inteligencije, oni imaju sposobnost snalaženja u nekim nepredvidljivim situacijama. Za razliku od robota prve generacije čiji je cilj bio da izvrše određeni pokret, roboti druge generacije imaju kao cilj izvršenje nekog zadatka i mogu, ako treba, menjati svoje kretanje da bi taj cilj postigli.
Možemo reći da je u nepredvidljivim situacijama ponašanje robota druge generacije donekle slično ponašanju slepog čoveka. On ne može osmotriti situaciju, onda doneti odluke, pa tek na kraju pristupiti kretanju. On informacije prikuplja uporedo sa kretanjem i odmah donosi odluke. Roboti treće generacije sposobni su da razdvoje proces prikupljanja informacija i donošenja odluke od kasnijeg kretanja kojim se odluke sprovode. Pokažimo i ovo na primeru delova rasutih po podlozi. Robot treće generacije postupa na sledeći način. Televizijska kamera snima podlogu, a računar vrsi analizu slike i zaključuje gde se nalaze delovi koje treba pokupiti i kako su orijentisani. Posle toga utvrđuje redosled skupljanja koji omogućava najbrže izvršenje. Ako su, međutim, delovi različiti, a bitan je redosled sakupljanja, onda će računar pri analizi slike prepoznati svaki od oblika. Nakon ovog prijema i analize informacija robot kreće na izvršenje zadatka tj. sakupljanje delova. Spomenimo i to da se roboti mogu opremiti daljinarom, senzorima zvučnih informacija i slično. Ovo bogatstvo informacija koje robot prima zahteva veoma složene algoritme za njihovu obradu. Zato je dalji razvoj robota bitno vezan za razvoj metoda veštačke inteligencije gde, između ostalog, podrazumevamo i metode prepoznavanja oblika i prepoznavanja govora. Neke buduće generacije robota sigurno će imati sve savršenija čula i savršeniji veštački intelekt.
Kada govorimo o istorijskom
razvoju industrijske robotike navedimo hronološki još neke važne
momente:
Krajem četrdesetih i
početkom pedesetih godina razvijaju se kopirajući manipulatori i
teleoperatori za rad sa radioaktivnim materijama;
Godine 1952. Institut za
tehnologiju u Masačusecu (MIT) prikazuje prvu numerički upravljanu
mašinu;
Godine 1954. u Velikoj Britaniji
je patentiran prvi robotski uređaj - manipulator sa numeričkim
upravljanjem (C. W. Kenward);
Godine 1954. projektovan je u SAD
uređaj pod originalnim nazivom "programmed article transfer"
ili, u slobodnom prevodu, sistem za programirano premeštanje predmeta
(George C. Devol). Godine 1960. kompanija Junimejt (engl. Unimate, rukovodilac
J. F. Engelberger) proizvela je prvi robotski uređaj prema ovom projektu.
1.6. ROBOTI U
INDUSTRIJI - FLEKSIBILNA AUTOMATIZACIJA
Roboti su, ušli u fabrike da
bi se postigla veća produktivnost proizvodnje. Počeli su od
jednostavnijih operacija i kretali se ka složenijim. Danas polja industrijske
primene robota možemo svrstati u četiri kategorije:
prenos (transfer) materijala i
opsluživanje mašina,
procesne operacije,
poslovi montaže
(asembliranje),
poslovi kontrole proizvoda (inspekcija).
Prva kategorija poslova karakteriše se time da je potrebno uhvatiti predmet i preneti ga na traženo mesto. Nekada je u pitanju samo prosto premeštanje delova u procesu proizvodnje, a nekada je potrebno staviti predmet u mašinu ili ga izvaditi iz nje i tada govorimo o opsluživanju mašine. Tipični primeri su opsluživanje prese ili struga.
Jednostavnije probleme iz domena prve kategorije mogli su rešavati i stariji, manje savršeni modeli robota. Na primer, opsluživanje prese svodi se na uzimanje radnog predmeta sa određenog mesta, stavljanje pod presu, i na kraju, nakon presovanja odlaganje predmeta na predviđeno mesto. Ako radni predmeti dolaze uvek na precizno određeno mesto sa koga će ih robot uzeti i ako se zahteva ponavljanje istog ciklusa, tada celu operaciju može izvesti robot sa prilično jednostavnim pogonskim i upravljačkim sistemom. Nije neophodno koristiti servo-sisteme već se može upotrebiti prost (npr. pneumatski) pogon, a zaustavljanje u željenom položaju postići postavljanjem mehaničkih graničnika. Pomeranje u svakom zglobu određeno je graničnicima koji ga zaustavljaju. Različiti položaj robota obezbeđuju se promenom položaja graničnika. Zbog ovakvog načina zadavanja položaja ovi manipulatori odlikuju se velikom preciznošću. Očigledno, kod ovakvih uređaja dosta
je komplikovano izmeniti zonu kretanja. Naime, potrebno je premestiti graničnike za svaki zglob. Zato se ovi uređaji danas teško mogu nazvati robotima. Savremeni roboti projektuju se tako da mogu opsluživati sve vrste mašina. Prostom izmenom kasete sa programom preorijentisaćemo robota sa opsluživanja prese na opsluživanje struga ili neke druge mašine, promeniti mu zonu rada, brzinu itd. Drugu kategoriju čine poslovi u kojima robot nosi neki alat ili uređaj kojim obavlja određenu proizvodnu operaciju na radnom predmetu. Karakteristični pri-meri iz ove kategorije su tačkasto i šavno zavarivanje, farbanje prskanjem, brušenje, poliranje itd. I kod ovih poslova javlja se različita složenost zadataka. Kod farbanja prskanjem potrebna je manja preciznost nego kod zavarivanja. Zatim, kod tačkastog zavarivanja dovoljno je ostvariti kretanje od tačke do tačke dok je kod šavnog zavarivanja potrebno pratiti kontinualnu putanju. Konačno, kod brušenja i poliranja potrebno je upravljati i silom pritiska na predmet koji se obraduje. Treća kategorija obuhvata problem montaže. Robot se koristi za sastavljanje različitih, prostih ili složenijih, sklopova. Zadatak koji se često postavlja u montaži je uvlačenje predmeta zadatog oblika u odgovarajući otvor. U teorijskim razmatranjima uglavnom se koristi takav zadatak montaže. Poslovi montaže su skoro ušli u domen primene robota. To je posledica složenosti zahteva koji se postavljaju: velika preciznost, upravljanje silama koje se pri sastavljanju javljaju i sl. Ovakva primena robota često obuhvata i vizuelne sisteme. Konačno, u četvrtoj kategoriji, roboti obavljaju poslove kontrole. Ova primena tesno je vezana sa razvojem svih vrsta senzora: taktilnih senzora, ultrazvučnih i laserskih uređaja i konačno svih vrsta vizuelnih sistema.
U početnoj fazi primene robota u industriji oni su uglavnom obavljali one poslove koji su monotoni, koji se obavljaju u nezdravim uslovima i slično. Uopšte, to su poslovi od kojih je čoveka poželjno osloboditi, pa tako roboti imaju određenu ulogu u humanizaciji rada. Treba, međutim, reći da roboti u industriju nisu uvedeni prvenstveno iz humanih, već iz ekonomskih razloga. Roboti su veoma produktivni, oni rade u više smena, rade ujednačenim ritmom, prave malo škarta. Jednostavno rečeno, proizvodnja u kojoj učestvuju roboti je jeftinija. Današnjoj industriji u kojoj dominira proizvodnja u velikim serijama svako pojeftinjenje proizvodnje veoma je značajno. Razmotrimo posebno pitanje veličine serija u industrijskoj proizvodnji. Kažemo da danas još uvek dominira velikoserijska proizvodnja koja se smatra uslovom ekonomičnosti. Takvoj proizvodnji prilagođena je većina proizvodnih pogona današnje industrije. Takve automatizovane proizvodne linije nazivaju se fiksnom automatizacijom. Te linije i kompletna oprema na njima namenjene su proizvodnji samo određenog proizvoda. Svaka izmena predstavlja složen problem. S obzirom na velika ulaganja u formiranje takve proizvodne linije ona postaje isplativa samo pri proizvodnji velikih serija. Drugi uslov je da taj proizvod bude aktuelan u dužem vremenskom periodu jer nakon prestanka proizvodnje angažovana oprema se teško može koristiti za druge svrhe.
Stručnjaci smatraju da
će u domenu veličine proizvodnih serija u skoroj budućnosti
doći do bitnih promena. Uslovi tržišta počinju
već danas u mnogim oblastima diktirati proizvodnju u malim serijama,
nekada samo nekoliko desetina komada. Smatra se da će se ova tendencija
smanjivanja serija nastaviti i veliki deo industrije moraće se
preorijentisati na proizvodnju malih serija i česte izmene predmeta
proizvodnje. Tako dolazimo do proizvodnih sistema koji se brzo
prilagođavaju promenama u proizvodnom programu i čak imaju
mogućnost istovremene proizvodnje različitih proizvoda. Za takve
sisteme koristi se naziv fleksibilni proizvodni sistemi ili fleksibilna
proizvodnja. Iz istih razloga takav način automatizacije nazivamo
fleksibilnom automatizacijom. Za ovakvu proizvodnju orijentisanu na male serije
i posebno sposobnu za brzo osvajanje novih proizvoda neophodno je više
uslova. Prvi uslov je efikasno i brzo projektovanje, a to znači
korišćenje metoda računarskog projektovanja (engleski CAD tj.
computer-aided design). Te metode obično obuhvataju programe čijim
korišćenjem se brzo mogu izvršiti složeni proračuni i
provere budućeg proizvoda. Složeniji sistemi CAD sposobni su da na
osnovu postavljenih projektnih zahteva sami daju potrebna konstruktivna
rešenja, odnosno izvrše projektovanje. Većina CAD-sistema je
negde između ove dve mogućnosti. Sastoje se iz programa za
proračun i proveru i komunikacionih programa koji korisniku
omogućavaju jednostavno rukovanje celim programskim sistemom. U njih se
ugrađuje logika projektovanja, tako da u interaktivnom radu korisnik
(projektant) brzo dolazi do rešenja. U ovakvim sistemima dosta se koriste
mogućnosti računarske grafike. Drugi uslov fleksibilne proizvodnje je
sama proizvodna linija sposobna za pri-lagodavanje različitim proizvodima.
To su visoko automatizovane linije sa velikim korišćenjem robota.
Ranije isticana univerzalnost robota sa stanovišta mogućnosti
izvršavanja različitih operacija ovde dolazi do punog izražaja.
Oni uveliko doprinose sposobnosti proizvodnje da se prilagođava
različitim predmetima proizvodnje.
Ilustrujmo jednim primerom kako primena robota bitno utiče na fleksibilnost proizvodnje. Automobilska industrija uglavnom se zasniva na fiksnoj automatizaciji. Delovi motora ili prenosnog sistema i trapova proizvode se na taj način. Slično je i u procesu sklapanja motora itd. Razmotrimo, međutim, proces zavarivanja karoserija. Zahvaljujući robotima, taj proces je veoma fleksibilan. Ista robotska linija može zavari vati različite tipove karoserija uz prostu izmenu programa. Fleksibilna proizvodnja podrazumeva računarsko upravljanje celim procesom. I ne samo to. Računari upravljaju pripremom proizvodnje, kontrolom proizvoda, skladištenjem i transportom. Uz široku primenu računara u obradi tržišta i savremenih računarskih sistema projektovanja dolazimo do pojma računarski integrisane proizvodnje (engleski CIM tj. computer-integrated manufacturing).
Roboti su postali nezamenljivi
faktor savremene industrijske proizvodnje.